ПЕРЕВОЗКА СТЕКЛА, ВИТРАЖЕЙ И СТЕКЛОПАКЕТОВ
Если бы природа не «изобрела» стекло, то его, наверняка, придумал бы человек. Стекло появилось на земле еще до появления первого человека, и оно мало напоминало наше сегодняшнее стекло, оно было не — прозрачным, почти черным и имело вулканическое происхождение. Такое стекло нельзя было использовать по тому назначению, какое оно имеет сейчас.
Человек научился получать стекло чуть более 5000 лет назад. Упоминания о стекле мы находим в древнем Египте. Его использовали для изготовления различных украшений, бус. Позднее научились изготавливать из него бутылочки для масел и парфюмерии. Но все равно стекло по-прежнему оставалось непрозрачным и имело оттенок. Первое прозрачное стекло было получено человеком только в 1 веке до нашей эры. Потом люди научились изготавливать плоское прозрачное стекло, которое мы сейчас и используем повсеместно.
Стекло очень хрупкий, нежный и невероятно красивый материал.
Все современные мегаполисы — это комбинация бетона и стекла. Стекло используют повсеместно, ни одно строительство не обходится без стекла. И его надо перевозить, и перевозить аккуратно, бережно с умением и пониманием. Компания МосАвтоПро профессионально занимается перевозкой стекла, стеклопакетов, витражей.
При перевозке стекла есть свои особенности, которые мы изучили за многие годы работы в области перевозки такого хрупкого материала. Как правило,
стекло перевозится в деревянных ящиках разных размеров как по высоте и ширине, так и по толщине.
Без использования пирамид перевозка стекла автотранспортом возможна только на специальных машинах — панелевозах. Но на них, в отличие от манипуляторов, которые могут сами себя погрузить и разгрузить, необходимо еще использовать кран, как на месте загрузки, так и на месте разгрузки стекла. А если стекло надо вести в другой город? Очевидно, что использование манипуляторов с пирамидами самый удобный и менее затратный способ перевозки стекла.
Перевозка стекла — дело архиважное, ответственное, и в некоторой степени «фартовое». Но чтобы не отдавать всё на откуп изменчивой
фортуне, всё же благоразумнее обратиться в компанию МосАвтоПро. Для безопасной и надёжной перевозки стекла у нас имеются контейнеры и пирамиды с необходимыми
выравнивающими и демпфирующими накладками-фиксаторами.
Для безопасной и надёжной перевозки стекла у нас имеются контейнеры и пирамиды с необходимыми
выравнивающими и демпфирующими накладками-фиксаторами.
При погрузке и разгрузке стекла мы используем специальные траверсы с вакуумными присосками-захватами, которые необходимы и при монтаже стекол. Важно на чём устанавливается пирамида для перевозки такого деликатного груза как стекло. Платформа грузовика должна иметь деревянное основание и перекрытия, так как оно лучше гасит колебания пирамиды с установленными ящиками со стеклом. МосАвтоПро использует для перевозки стекла грузовые платформы с современной пневматической и рессорно-пружинной подвеской, что влияет на безопасность и надежность перевозки.
На манипуляторах компании МосАвтоПро были перевезены витринные стеклопакеты пятикомпонентного исполнения из Санкт-Петербурга от фирмы
производителя «Линия Стекла» г. Санкт-Петербург. Витринные стеклопакеты размером 6000мм*3150 мм и весом 1,2 тонны каждый; перевезти из Санкт-Петербурга
и смонтировать с использованием крана того же манипулятора, который и доставил эти стеклопакеты, не перегружая их лишний раз, а сразу монтируя в
витринный проем — это как говорится дорогого стоит. Да и еще это очень и очень удобно. Данная работа выполнялась по адресу г. Москва,
ул. Тверская, д.2, д.4. Также много банков, автосалонов и ресторанов воспользовались услугами перевозки стекла и его монтажа нашей компанией,
витрины которых радуют нас и по сей день современным красивым остеклением.
Да и еще это очень и очень удобно. Данная работа выполнялась по адресу г. Москва,
ул. Тверская, д.2, д.4. Также много банков, автосалонов и ресторанов воспользовались услугами перевозки стекла и его монтажа нашей компанией,
витрины которых радуют нас и по сей день современным красивым остеклением.
Специалисты компании МосАвтоПро выполняют все виды перевозок стекла от любых габаритов ящиков со стеклом, до перевозки негабаритных стеклопакетов, витринных стекол, витражей. В завершении хотелось бы еще раз акцентировать внимание наших клиентов — не полагайтесь на «авось», доверьте ответственное дело серьезным профессионалам, накопившим большой опыт в перевозке стекла.
Все особенности перевозки стекла и стеклопакетов учитывают специалисты нашей компании при
составлении плана перевозки. Заказать перевозку стекла, стеклопакетов, витринных стекол и витражей можно через нашу диспетчерскую службу по телефонам
(495)774-49-60 или (495)722-55-10. Также можно заказать перевозку ящиков со стеклом и через нашу почтовую форму со страниц
сайта МосАвтоПро.
Также можно заказать перевозку ящиков со стеклом и через нашу почтовую форму со страниц
сайта МосАвтоПро.
Перевозка стекла, стеклопакетов, витринных стекол и витражей — это серьезно. Обращайтесь в МосАвтоПро! Катим вместе!
Перевозка стекла, перевозка стекла манипулятором
Перевозка стекла манипулятором — перевозка стекла
Современные города, такие как Москва и населенные пункты Московской области – это гармоничная комбинация бетона и стекла. Поэтому перевозка стекла – одна из самых востребованных услуг. Без такого материала сложно представить строительство даже небольшого частного сооружения.Перевозка стекла манипулятором – одна из услуг нашей компании, которая с 2006 года предоставляет транспортировку разных видов груза по всему региону. Главное преимущество обращение в организацию – это низкая стоимость услуг и качественное исполнение. Более того, перевозка стекла, недорого предоставленная нашей компанией, окажется оперативной.
Сразу следует отметить, что такой вид груза очень хрупкий. Перевозка стекла автотранспортомдолжна осуществляться максимально аккуратно. К тому же специалисты по транспортировки должны знать все тонкости погрузки, разгрузки и перемещения столь хрупкого материала.
Если интересует перевозка стекла в Москве, области нашей компанией, то можете не сомневаться, что на место будет доставлен целый, неповрежденный груз. Это гарантируем, так как относимся к каждому запросу клиентов бережно и ответственно:
— перевозка стекла в Мытищах, Долгопрудноми других городах Московской области осуществляется посредством манипулятора, оборудованного специальной пирамидой. На такой конструкции стекла, зеркала надежно фиксируются в вертикальном положении. Такая перевозка стекла в Пушкино, Балашихе позволит транспортировать даже по самой плохой, ухабистой дороге, при этом хрупкий груз будет в целостности;
— наши специалисты особое внимание уделяют упаковке материала. Как правило, если заказывается перевозка стекла в Красногорске, Лобне, то мы применяем и используем специальные ящики. Если транспортировки подлежит несколько стекол или зеркал, между ними обязательно прокладывается мягкий материал. Кроме этого, пирамиды оббиваются войлоком, поэтому вероятность повреждения материала – исключается;
Если транспортировки подлежит несколько стекол или зеркал, между ними обязательно прокладывается мягкий материал. Кроме этого, пирамиды оббиваются войлоком, поэтому вероятность повреждения материала – исключается;
— перевозка стекла в Королеве и других городах предусматривает еще и составление максимально короткого, безопасного маршрута.
Эвакуатор Мытищи недорого — круглосуточно!
Перевозка стеклопакетов, стекла, остекление фасадов и монтаж стекол манипулятором
Главная >> Услуги крана манипулятора >> Перевозка стеклопакетов Стеклопакеты – очень хрупкое изделие, поэтому компаниям, реализующим подобную продукцию и занимающихся ее установкой, необходимо предусмотреть все детали, чтобы доставка была безопасна и удобна. Если нет возможности самостоятельно создать требуемые условия для транспортировки, то стоит обратиться за услугами в мувинговую компанию, которая имеет соответствующий транспорт и может обеспечить доставку согласно всем правилам.Перевозка стеклопакетов будет безопасной, если на платформу грузового авто установить конструкцию, которую прозвали «пирамида». Она крепится к кузову и позволяет транспортировать соответствующую продукцию в вертикальном положении. В качестве платформы лучше всего использовать манипулятор, поскольку в таком случае можно дополнительно организовать оперативную погрузку и разгрузку стеклопакетов любых размеров. Такой способ транспортировки менее затратный, надежный и удобный.
Она крепится к кузову и позволяет транспортировать соответствующую продукцию в вертикальном положении. В качестве платформы лучше всего использовать манипулятор, поскольку в таком случае можно дополнительно организовать оперативную погрузку и разгрузку стеклопакетов любых размеров. Такой способ транспортировки менее затратный, надежный и удобный.
Преимущества конструкции «пирамида»
«Пирамиду» нужно подбирать исходя из особенностей конструкции автомобиля и нагрузок, которые будут на нее возлагаться. При соблюдении норм можно:
- достичь жесткой фиксации стеклопакета практически в вертикальном положении;
- исключить смещение груза во время транспортировки;
- предотвратить порчу груза и гарантировать его доставку в целости и сохранности.
«Пирамида» очень вместительна. При ее использовании исключается прогиб и подвижка груза, его трение о внутреннюю поверхность кузова. Риск повреждения стеклопакета сводится к минимуму. Именно поэтому подобную конструкцию используют для транспортировки стекол, зеркал, витражей и других подобных изделий.
Именно поэтому подобную конструкцию используют для транспортировки стекол, зеркал, витражей и других подобных изделий.
Правила погрузки и разгрузки
Стеклопакет нужно фиксировать на «пирамиде» таким образом, чтобы он не соприкасался с элементами конструкции. Для этого его обтягивают войлочным или полиуретановым материалом. Фиксацию к конструкции осуществляют с помощью специальных ремней. Перед тем, как начать движение, необходимо обязательно убедиться в надежности крепления.
Наша компания готова выполнить перевозку стеклопакетов любых размеров и форм. Для этого мы используем манипулятор и конструкцию в виде «пирамиды». Под ней оборудовано деревянное основание, которое гасит колебания и вибрацию. Для погрузки и разгрузки имеются специальные траверсы с вакуумными захватами-присосками, которые очень удобны и для монтажа стекол. Они позволяют поднять стеклопакет на нужную высоту и удерживать его до момента полной установки.
Мы готовы сотрудничать с компаниями любого масштаба и гарантируем качественное исполнение каждого заказа. Сделать заказ возможно по телефону (495) 790-34-04
Сделать заказ возможно по телефону (495) 790-34-04
Похожие статьи
Перевозка стекла с помощью пирамиды по разумной цене
Стекло — хрупкий материал, который требует соблюдения определенных условий при транспортировке. Ошибки в транспортировке и погрузке приводит к появлению трещин, царапин и потертостей. Для перевозки стекла используют:
- Бортовой автомобиль с пирамидой, которая устанавливается посередине прицепа или платформе;
- Специально оборудованные контейнеры;
- Панелевозы.
Специфика транспортировки и использования манипуляторов с пирамидой
При перевозке стекла используют ящики из дерева. Вес ящика со стеклом варьируется от ста килограммов до нескольких тонн. Поэтому для прочного крепежа необходимо специальное устройство.
Таким устройством стала пирамида из профильной трубы. Она служит опорой для ящика любого размера. Доставка стекла возможна без использования пирамиды на панелевозе, который требуют применения крана при разгрузке и загрузке материалов.
В отличие от панелевозов манипуляторы с пирамидой выполняют автоматическую погрузку. Это сэкономит время и сохранит целостность хрупкого материала.
Грузчики компании “ГрузВоз” бережно и надежно установят стекло на пирамиду. Для установки используют специальные подкладки, а крепеж подбирают с учетом грузоподъемности автомобиля и размеров материала.
Чтобы увеличить безопасность стекла и стеклянных изделий при транспортировке, доставка происходит с ограничением скорости автомобиля до 80 км/час.
Транспорт с пирамидой для перевозки
Газель с пирамидой – самый востребованный автомобиль при перевозке небольших стекол, зеркал, стеклопакетов. В автопарке компании представлена стандартная и удлиненная до 4,2 метров Газель вместительностью до 2 тонн.
Мы предоставляем пирамидальные конструкции и специальный тент для них. Он защитит стекло от пыли, грязи, осадков и других неблагоприятных факторов окружающей среды.
Регулярный техосмотр машин обеспечит безопасность переезда и сохранность груза. Мы подберем подходящий вид транспорта в зависимости от параметров груза и дальности следования.
Мы подберем подходящий вид транспорта в зависимости от параметров груза и дальности следования.
Упаковка стекла, стеклянных изделий и зеркал при переезде
Клиент может самостоятельно упаковать стекло, либо доверить работу упаковщикам компании. Они имеют большой опыт в проведении перевозок и подготовки груза к доставке.
Мы предоставляем собственный упаковочный материал. Для упаковки стеклянных материалов применяем картонные пачки, контейнеры и деревянные ящики.
При упаковке стеклоизделий в контейнеры, каждый лист обвертывают картоном или бумагой. На пирамиде их устанавливают плотно друг к другу. Применение при закреплении упорных и прижимных планок поможет избежать сдвигов и качания при перевозке.
При упаковке стекла в дощатые ящики на дно стелют сухую стружку толщиной 25-30 мм. Пачки плотно устанавливают друг к другу и регулируют зазоры. Свободное пространство заполняют стружкой.
Для амортизации уплотнения и защиты стеклянных изделий от разрушений мы применяем гофрокартон.
Компания “ГрузВоз” упакует, погрузит и доставит стекло и другие материалы в Москве, Московской области и России. Заказывайте перевозки у нас!
Оставьте заявку
Укажите имя и телефон. Служба поддержки свяжется с вами в течение 5 минут.
ЗАКАЗАТЬПеревозка стекла, зеркал | Цены на аренду стекловоза в России
Другие результаты поиска по запросу «перевозка стекла»
Поиск запроса «перевозка стекла» по информационным материалам
Перевозка стекла и зеркал – достаточно сложная процедура. Во время езды любая неровность может причинить вред хрупкому грузу. Сервис “Перевозка 24” позволяет найти объявления услуг частных лиц, занимающихся транспортировкой любых видов стеклянной продукции. Вы самостоятельно можете подобрать команду специалистов, которая быстро и аккуратно осуществит перевозку стекла и зеркал в любую точку страны.
Особенности перевозки стекол
Стекло транспортируется как в виде отдельного полотна, так и в качестве готовой продукции (зеркало, стеклопакеты, двери с хрупкими вставками). Такие изделия боятся тряски, механических воздействий и даже вибрации, неизбежной во время движения даже по самому гладкому дорожному полотну.
Кроме того, очень важно не допускать изгиба изделий внутри кузова, так как это неизбежно приведет к его повреждению. Поэтому к стекловозу предъявляются особые требования.
Особого внимания требует погрузка и закрепление стекла. В зависимости от того, в каком виде перевозится материал, упаковка груза происходит по-разному:
- стеклянные полотна складываются друг на друга в виде стопки. Каждое полотно перекладывается бумагой, а вся конструкция укладывается в ящик из картона на засыпанные заранее древесные опилки. Последние играют роль амортизатора;
- небольшие готовые изделия (стеклопакеты или зеркала) крепятся к установленной в кузове пирамиде вертикально при помощи ремней или жестких креплений;
- большие изделия, габариты которых превышают 2,8х2 м и весом более 1,2 т, должны транспортироваться специальным транспортом, но также надежно фиксируются ремнями;
- во время перевозки стекла груз должен постоянно находиться под присмотром.


Услуги сервиса «Перевозка 24»
Диспетчерские центр предоставляет объявления квалифицированных мастеров, которые соблюдают все требования, необходимые для качественной перевозки хрупких грузов. Цена перевозки стекла будет зависеть от нескольких факторов:
- расстояния;
- веса;
- габаритов;
- упаковки.
Также во время расчета времени доставки груза принимаются во внимание возможные внештатные ситуации – пробки, повреждения автомобиля, объезды и т.п. Поэтому водитель в конечном счете сообщит вам не точное время, а временной промежуток, в течение которого будет доставлено стекло.
К каждому заказчику осуществляется индивидуальный подход. На сайте сервиса «Перевозка 24» можно также найти объявления по перевозке нестандартных грузов: витрин, витражей. Аренда стекловоза для них оговаривается отдельно. В перечень услуг владельцев техники входит также погрузка и выгрузка хрупких изделий. Все работы будут осуществлены таким образом, чтобы обеспечить полную сохранность доверенного стекла. Для упаковки используется мягкая воздушно-пузырьковая пленка, стрейч-пленка, гофрокартон.
Для упаковки используется мягкая воздушно-пузырьковая пленка, стрейч-пленка, гофрокартон.
Заказать машину для перевозки стекла и зеркал можно, позвонив по номеру телефона, указанному в объявлении, и указав параметры перевозимого груза. Будет составлен детальный план с последующим расчетом полной стоимости транспортировки.
Услуги манипулятора в Чебоксарах
Услуги манипулятора в Чебоксарах. У нас вы можете заказать манипулятор для своих целей. Стоимость аренды манипулятора узнавайте по телефону.
Тел.: 8 (927) 849 86 84
E-mail: [email protected]
Услуги манипулятора нужны для транспортировки малогабаритного багажа разного типа. Применять манипулятор разрешено для транспортировки непрочных материалов, к примеру стекла и наиболее тяжких малогабаритных грузов, к примеру вагончиков, киосков, остановок. При составлении маршрута движения манипулятора с багажом нужно учесть положение дорог и погодные условия, а еще учесть все нюансы, которые могут сделать урон багажу.
При составлении маршрута движения манипулятора с багажом нужно учесть положение дорог и погодные условия, а еще учесть все нюансы, которые могут сделать урон багажу.
Манипулятор применяют для перевозки промышленного оснащения и станков. Огромное индустриальное создание, маленькая компания со своим производственным цехом имеет необходимость в качественном оборудовании (станки, ЧПУ). Транспортирование станков еще нужно при обустройстве, переезде цехов. При транспортировке хоть какого промышленного оснащения нужно учесть его индивидуальности. Шофер манипулятора исполняет погрузку оснащения, осуществляет контроль крепления на борту, исполняет доставку и разгрузку в предписанное в путевом листе место либо площадку.
При перевозке манипулятором такового вида продукта, как водоизоляционные материалы, нужно строго соблюдать технику безопасности. При транспортировке водоизоляционные материалы обязаны располагаться не ближе одного метра от отопительных устройств, потому что они относятся к продуктам с высочайшей ступенью огнеопасности. После доставки этого вида багажа нужно, чтоб получатель груза поставил подпись в товаротранспортном документе и отметил, что груз доставлен был в целости и сохранности. Это обязательно, чтобы исключить возможность жалоб со стороны собственника багажа к перевозчику.
После доставки этого вида багажа нужно, чтоб получатель груза поставил подпись в товаротранспортном документе и отметил, что груз доставлен был в целости и сохранности. Это обязательно, чтобы исключить возможность жалоб со стороны собственника багажа к перевозчику.
Манипулятор может быть применен для перевозки стекла. Транспортировать стекло — непросто, это сопровождается особыми требованиями к персоналу и технике. Транспортирование стекла регламентируются ГОСТом 111-2001 (Стекло листовое. Тех. условия).
Стеклянные предметы перевозят разным видом автотранспорта в согласовании с правилами перевозок грузов, действующими на предоставленном облике автотранспорта. Разрешено транспортировать стекло манипулятором, тогда расположение и крепление нужно исполнять в согласовании с Техническими критериями погрузки и крепления грузов. При транспортировке тары со стеклом нужно, чтоб торцы листов стекла были размещены сообразно течению перемещения манипулятора, и зафиксированы, чтоб исключить вероятность движения и качания в процессе транспортировки.
При перевозке, погрузке и разгрузке стекла с поддержкой манипулятора обязательно должны быть приняты меры, которые обеспечат его целостность от автоматических дефектов и погодных условий.
Рекламная информация — открытие человека, которое возникло издавна. В данный момент нереально представить города, в которых нет маркетинговых баннеров, щитов, маркетинговых стел. Любой бизнесмен желает реализовать собственный продукт быстрее и дороже. Для данного нужно чтоб о товаре знало много народу. Транспортирование маркетинговых систем (пилоны, стелы, световые короба, маркетинговые билборды, пилоны, маркетинговые щиты) требует особенной осмотрительности. Транспортировка маркетинговой системы, плакатов, щитов относится к транспортировке малогабаритных грузов.
При транспортировке нужно учесть множество причин и особенностей. Вес маркетинговых систем может быть несколько тонн, потому нужно заказывать манипулятор с платформой, специально для транспортировки грузов предоставленного тоннажа. Составляющие маркетинговых систем непрочные, просто бьются и требуют перевозки манипулятором с особенной осмотрительностью. При транспортировке на манипуляторе их нужно расположить на траверсах, со смягчающими тряску материалами. Для транспортировки маркетингового щита необходимо применять «пирамиду» (горизонтальная или вертикальная подставка, на которой есть ремни с защелками, для закрепления маркетинговой системы).
Составляющие маркетинговых систем непрочные, просто бьются и требуют перевозки манипулятором с особенной осмотрительностью. При транспортировке на манипуляторе их нужно расположить на траверсах, со смягчающими тряску материалами. Для транспортировки маркетингового щита необходимо применять «пирамиду» (горизонтальная или вертикальная подставка, на которой есть ремни с защелками, для закрепления маркетинговой системы).
Для перевозки павильонов и киосков применяют манипулятор, у него невысокая платформа, поэтому можно транспортировать почти все типы павильонов. С использованием манипулятора легко и просто выполнить погрузку и выгрузку павильона в то место куда нужно. Труднодоступные площадки, городские площади, остановки автотранспорта и системы киоска (присутствие непрочных частей, стекло, навесы, козырьки) для перевозки с помощью услуги манипулятора более эффективны.
Высокое качество стекла манипулятора для промышленного использования
Магазин для.Большинство. стекла манипулятора представлены детали из алюминия и других прочных и легких сплавов. Многие из них также оснащены вакуумными присосками на конце руки для безопасного захвата ваших продуктов. Некоторые типы можно запрограммировать с помощью команд искусственного интеллекта и оставить для автоматического запуска. Крупномасштабные операции могут использовать это для простого увеличения производительности. Несколько моделей могут двигаться в четырех разных направлениях.
Просмотрите широкий выбор поставщиков на Alibaba.
Получить. стекла манипулятора с Alibaba.com, чтобы обеспечить бесперебойную работу вашего производства при низких затратах. Найдите модель с подходящим стилем и функциями. Просмотрите несколько. стекла манипулятора и настройте порядок, который будет работать как для вашего производственного предприятия, так и для вашего бюджета.
 стекла манипулятора на Alibaba.com, когда вам нужна автоматизация и эффективность на вашем предприятии. Используйте один, чтобы перемещать и сортировать детали и другие мелкие предметы, не делая это вручную. Производители автомобилей и заводы по упаковке пищевых продуктов сочтут его полезным. стекла манипулятора в пределах своих возможностей. Настройте его, чтобы сэкономить время и затраты на рабочую силу, но при этом достичь производственных целей.
стекла манипулятора на Alibaba.com, когда вам нужна автоматизация и эффективность на вашем предприятии. Используйте один, чтобы перемещать и сортировать детали и другие мелкие предметы, не делая это вручную. Производители автомобилей и заводы по упаковке пищевых продуктов сочтут его полезным. стекла манипулятора в пределах своих возможностей. Настройте его, чтобы сэкономить время и затраты на рабочую силу, но при этом достичь производственных целей.  com, чтобы помочь вам найти. стекла манипулятора именно то, что вам нужно. Цвета и логотипы могут быть изменены по мере необходимости. Некоторые поставщики разрешают установку в полевых условиях, чтобы сэкономить время и деньги. Также доступны другие послепродажные услуги, такие как онлайн-техническая поддержка и бесплатные запчасти. Некоторые поставщики могут прислать образцы, чтобы вы могли протестировать свою модель перед покупкой стандартного заказа.
com, чтобы помочь вам найти. стекла манипулятора именно то, что вам нужно. Цвета и логотипы могут быть изменены по мере необходимости. Некоторые поставщики разрешают установку в полевых условиях, чтобы сэкономить время и деньги. Также доступны другие послепродажные услуги, такие как онлайн-техническая поддержка и бесплатные запчасти. Некоторые поставщики могут прислать образцы, чтобы вы могли протестировать свою модель перед покупкой стандартного заказа. Стеклоподъемники | Мобильные погрузчики для стекла | Стеклянные манипуляторы
GLG класс «B»: Модель 360 SP
Компактный и маневренный самоходный стеклянный подъемник
GLG 360 SP — это мобильный стеклянный манипулятор с самоходным аккумуляторным электроприводом, способный собирать и транспортировать и точное размещение 360 кг / 794 фунтов. Стандартная комплектация с присосками.
Стандартная комплектация с присосками.
Сопоставимые модели
— Модель 360 SP может быть оснащена аксессуарами, такими как передний подъемный рычаг — для сравнения, 425 SP 3D имеет встроенный телескопический рычаг и оснащен 3D-головкой для монтажа.Подъемник на 425 кг также выпускается с дистанционным управлением.
Гидравлические органы управления позволяют оператору загонять панели из пера
— с точностью до миллиметра в проем.
Ручные ручки предоставляют оператору возможность
— вручную повернуть панели на 180 градусов по часовой стрелке или против часовой стрелки. ,
— вручную поверните груз влево или вправо от машины для боковой загрузки при перемещении по участкам с ограниченным доступом.
— Боковая нагрузка составляет 100 кг / 220 фунтов.
— ручной боковой поворот — ручное управление боковым смещением, обеспечивающее регулировку на 76 мм / 3 дюйма влево / вправо от центра.
Передняя подъемная головка лифта
— поднимает грузы вверх или вниз, как вилочный погрузчик
Боковая транспортировка груза
— Поворачивает груз на левую или правую сторону машины для узкого прохода,
— опционально сдвоенные колеса могут быть добавлены к левой или правой стороне машины за считанные минуты для увеличения боковой грузоподъемности со 100 кг / 220 фунтов до 200 кг / 440 фунтов.
Дополнительный передний подъемный рычаг
— Грузоподъемность 193 кг / 425 фунтов
— поднимайте панели плоско с земли или уровня скамьи
— переверните панель вверх дном для размещения на столе
— установите световые люки на высоте до 3, 2 метра / 10,5 футов
Нулевой радиус поворота
– Идеально подходит для работы в ограниченном пространстве благодаря короткой конструкции шасси.
Мы рекомендуем подъемник для
— в витринах магазинов и новое строительство для более крупных требований
— подрядчики по остеклению
— установщики противопожарных дверей
— установка и обслуживание дверей легкорельсового транспорта
— установка перегородок в офисе
— производителей стекла
— для использования на заводе, где мостовые краны не могут добраться до
— для погрузки и разгрузки грузовиков.
Коротко о GLG 360 SP
Наш 360-килограммовый лифт — это недорогой вход в нашу самую популярную серию лифтов. Он прочен, чтобы выдерживать интенсивное использование. Мы рекомендуем этот подъемник для пользователей, выполняющих повторяющиеся монтажные задачи, когда подъемник можно использовать для многих подъемников с одинаковой конфигурацией — для пользователей с большим разнообразием и сложностью монтажных задач мы рекомендуем 425 SP-3D.
Технические характеристики
Размеры
Щелкните, чтобы распечатать PDF
Принадлежности, доступные для этой модели
Постоянный подъемный крюк, удлинительный рычаг с регулируемым подъемным крюком, вилочный погрузчик, вертикальный удлинитель, горизонтальный подъемный рычаг и двойные колеса
Мягкий электротермический манипулятор, обеспечивающий безопасную транспортировку и обращение с тонкими клеточными / тканевыми листами и биоэлектронными устройствами
Abstract
«Живые» клеточные листы или биоэлектронные чипы имеют большой потенциал для повышения качества диагностики и лечения. Однако обращение с этими тонкими и хрупкими материалами остается сложной задачей, поскольку внешняя сила, прикладываемая для захвата и освобождения, может легко деформировать или повредить материалы. В этом исследовании представлен мягкий манипулятор, который может легко манипулировать и транспортировать листы клеток / тканей и ультратонкие носимые биосенсорные устройства, повторяя принцип работы присоски головоногих. Мягкий манипулятор состоит из сверхбыстрого термочувствительного слоя микроканалированного гидрогеля с тканевой мягкостью и слоя электрического нагревателя.Электрический ток, подаваемый на манипулятор, заставляет микроканалы геля сжиматься / расширяться, что приводит к изменению давления в микроканалах. Манипулятор может поднимать / отсоединять объект за 10 с и может использоваться более 50 раз. Этот мягкий манипулятор будет очень полезен для безопасной и надежной сборки и имплантации терапевтических клеточных / тканевых пластин и биодатчиков.
Однако обращение с этими тонкими и хрупкими материалами остается сложной задачей, поскольку внешняя сила, прикладываемая для захвата и освобождения, может легко деформировать или повредить материалы. В этом исследовании представлен мягкий манипулятор, который может легко манипулировать и транспортировать листы клеток / тканей и ультратонкие носимые биосенсорные устройства, повторяя принцип работы присоски головоногих. Мягкий манипулятор состоит из сверхбыстрого термочувствительного слоя микроканалированного гидрогеля с тканевой мягкостью и слоя электрического нагревателя.Электрический ток, подаваемый на манипулятор, заставляет микроканалы геля сжиматься / расширяться, что приводит к изменению давления в микроканалах. Манипулятор может поднимать / отсоединять объект за 10 с и может использоваться более 50 раз. Этот мягкий манипулятор будет очень полезен для безопасной и надежной сборки и имплантации терапевтических клеточных / тканевых пластин и биодатчиков.
ВВЕДЕНИЕ
За последнее десятилетие были достигнуты большие успехи в сборке высокоэффективных биологических и электронных материалов с тонкой и сложной архитектурой. Например, было показано, что однослойные клеточные листы воспроизводят физиологическую активность исходной ткани и демонстрируют повышенную терапевтическую эффективность, чем отдельные клетки, из-за повышенных межклеточных взаимодействий и наличия внеклеточного матрикса ( 1 — 4 ). Эти клеточные листы активно изучаются для сборки моделей заболеваний in vitro и лечения раненых или дефектных тканей и органов. Кроме того, минимизация толщины носимых электронных устройств обеспечивает конформную адгезию без межфазного зазора и, в свою очередь, улучшает работу зондирования, диагностики и лечения ( 5 — 8 ).Однако обращение с такими хрупкими и тонкими материалами для транспортировки и сборки остается сложной задачей. Внешние силы, используемые для захвата, удержания и разгрузки таких материалов, часто деформируют, сминают или повреждают материалы ( 9 ). Такого повреждения можно избежать, прикрепив тонкие материалы к расходуемым полимерным опорам, включая водорастворимые или терморазрывные ленты ( 10 — 12 ).
Например, было показано, что однослойные клеточные листы воспроизводят физиологическую активность исходной ткани и демонстрируют повышенную терапевтическую эффективность, чем отдельные клетки, из-за повышенных межклеточных взаимодействий и наличия внеклеточного матрикса ( 1 — 4 ). Эти клеточные листы активно изучаются для сборки моделей заболеваний in vitro и лечения раненых или дефектных тканей и органов. Кроме того, минимизация толщины носимых электронных устройств обеспечивает конформную адгезию без межфазного зазора и, в свою очередь, улучшает работу зондирования, диагностики и лечения ( 5 — 8 ).Однако обращение с такими хрупкими и тонкими материалами для транспортировки и сборки остается сложной задачей. Внешние силы, используемые для захвата, удержания и разгрузки таких материалов, часто деформируют, сминают или повреждают материалы ( 9 ). Такого повреждения можно избежать, прикрепив тонкие материалы к расходуемым полимерным опорам, включая водорастворимые или терморазрывные ленты ( 10 — 12 ). Однако эти опоры следует удалять с помощью химической или длительной термообработки после размещения тонких материалов на целевом участке, что делает их непригодными для повторного использования.
Однако эти опоры следует удалять с помощью химической или длительной термообработки после размещения тонких материалов на целевом участке, что делает их непригодными для повторного использования.
Недавно были предприняты попытки транспортировать тонкие электронные материалы путем моделирования способности головоногих моллюсков (например, осьминогов и кальмаров) захватывать и выпускать свою добычу ( 13 — 15 ). Головоногие используют множество присосок на основе мышц, называемых присосками, на руках для достижения конформной адгезии к жертвам как во влажной, так и в сухой среде ( 16 , 17 ). Биоэлектрические сигналы контролируют быстрое сокращение и расслабление мягких мышц и, в свою очередь, изменяют внутреннее давление присосок.Однако большинство систем обработки материалов, которые были разработаны для имитации присосок, сосредоточены на повторении анатомической структуры, но упускают из виду роль биоэлектрического сигнала для управления. Следовательно, эти стратегии требуют внешнего приложения механической силы для прикрепления и отсоединения интересующих материалов. Кроме того, синтетические присоски, изготовленные из полидиметилсилоксана (ПДМС) или полиуретанакрилатов, на два или три порядка жестче, чем биологические присоски ( 13 , 15 ).Такие жесткие присоски требуют более высокого внешнего давления для захвата, чем биологические, что увеличивает вероятность повреждения тонких и мягких материалов. Были предприняты определенные усилия для сборки устройства, которое может удерживать и отделять материалы под действием тепла, путем покрытия пористого ПДМС термочувствительным поли ( N -изопропилакриламидом) (PNIPAAm) ( 14 ). Однако процесс манипуляции был возможен только при погружении в водяную баню. Кроме того, устройству требуется от 30 минут до часов, чтобы переместить один материал из одного места в другое.
Кроме того, синтетические присоски, изготовленные из полидиметилсилоксана (ПДМС) или полиуретанакрилатов, на два или три порядка жестче, чем биологические присоски ( 13 , 15 ).Такие жесткие присоски требуют более высокого внешнего давления для захвата, чем биологические, что увеличивает вероятность повреждения тонких и мягких материалов. Были предприняты определенные усилия для сборки устройства, которое может удерживать и отделять материалы под действием тепла, путем покрытия пористого ПДМС термочувствительным поли ( N -изопропилакриламидом) (PNIPAAm) ( 14 ). Однако процесс манипуляции был возможен только при погружении в водяную баню. Кроме того, устройству требуется от 30 минут до часов, чтобы переместить один материал из одного места в другое.
С этой целью мы демонстрируем мягкий манипулятор, который может повторять удержание и выгрузку тонких и хрупких материалов в течение 10 секунд в ответ на электрический сигнал. Мы предположили, что быстро реагирующий на температуру микроканальный гидрогель, покрытый слоем микроэлектрического нагревателя, будет поднимать и высвобождать интересующие материалы без приложения внешней силы из-за вызванного температурой изменения внутреннего давления в микроканалах геля (). Кроме того, гели, изготовленные так, чтобы быть такими же мягкими, как биологические присоски, позволили бы быстро и ощутимо изменять внутреннее давление в ответ на небольшие изменения температуры, при этом сводя к минимуму количество силы, прикладываемой к тонкому материалу, который необходимо транспортировать.Мы проверили эту гипотезу, прикрепив гибкий электрический нагреватель, преобразующий электрические сигналы в тепло, к микроканальному гидрогелю PNIPAAm. Мы исследовали степень, в которой электротермический сигнал контролирует сжатие и расширение микроканалов геля вместе с последующим изменением давления внутри микроканалов. Полученный мягкий манипулятор был оценен на предмет его способности поднимать и высвобождать тонкие материалы на ткани-мишени быстро в ответ на электротермический сигнал. Эти тонкие материалы включают терапевтические листы стволовых клеток и ультратонкие носимые биоэлектронные устройства.
Кроме того, гели, изготовленные так, чтобы быть такими же мягкими, как биологические присоски, позволили бы быстро и ощутимо изменять внутреннее давление в ответ на небольшие изменения температуры, при этом сводя к минимуму количество силы, прикладываемой к тонкому материалу, который необходимо транспортировать.Мы проверили эту гипотезу, прикрепив гибкий электрический нагреватель, преобразующий электрические сигналы в тепло, к микроканальному гидрогелю PNIPAAm. Мы исследовали степень, в которой электротермический сигнал контролирует сжатие и расширение микроканалов геля вместе с последующим изменением давления внутри микроканалов. Полученный мягкий манипулятор был оценен на предмет его способности поднимать и высвобождать тонкие материалы на ткани-мишени быстро в ответ на электротермический сигнал. Эти тонкие материалы включают терапевтические листы стволовых клеток и ультратонкие носимые биоэлектронные устройства.

Схематическое изображение ( A ) мягкого манипулятора с электротермическим управлением и ( B ) процесса транспортировки тонкого материала с помощью мягкого манипулятора. (A) Мягкий манипулятор состоит из поддерживающего гибкого нагревателя, который может преобразовывать электрический ток в тепло, влажного клея на основе цианоакрилата и термочувствительного гидрогеля PNIPAAm с выровненными микроканалами.(B) Процесс транспортировки интересующих материалов с помощью мягкого манипулятора. Сначала опускают мягкий манипулятор, чтобы гель контактировал с тонким материалом, таким как терапевтический клеточный лист или ультратонкое пленочное устройство. На этом этапе включается нагреватель, чтобы сузить микроканалы геля. Во-вторых, нагреватель отключается, чтобы открыть микроканалы геля и создать отрицательное давление в микроканалах. Как следствие, гель служит для удержания, подъема и транспортировки тонкого материала. В-третьих, нагреватель включается, чтобы закрыть микроканалы геля и, в свою очередь, создать положительное давление в микроканалах. Положительное давление служит для выпуска тонкого материала на целевую поверхность.
Положительное давление служит для выпуска тонкого материала на целевую поверхность.
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
Мы приготовили гидрогель, который претерпевает быстрое изменение объема в ответ на изменение температуры путем введения анизотропно выровненных микроканалов в гель PNIPAAm. Гель с микроканализацией собирали путем помещения предварительно желатинированного раствора NIPAAm на верх резервуара с жидким азотом. Затем кристаллы льда зарождались снизу и росли к верхней поверхности из-за температурного градиента (шаг 1 в).Одновременно растворенные вещества, включая мономер NIPAAm, сшивающий агент и фотоинициатор в растворе, были отделены от растущих кристаллов льда из-за пониженной растворимости в кристаллах льда (этап 2 в). Эта непрерывная и направленная сегрегация растворенных веществ образовывала криоконцентрированную фазу между растущими кристаллами льда. Последующее воздействие на замороженный образец полимеризации, активированной ультрафиолетовым (УФ) светом, и реакции сшивания зафиксировали анизотропно выровненную сеть PNIPAAm (шаг 3 в) ( 18 , 19 ). Последний процесс промывки водой удалил кристаллы льда и создал гель PNIPAAm с непрерывно выровненными микроканалами (). Полученный гель имел средний диаметр микроканалов ~ 20 ± 4 мкм и среднюю толщину стенки 0,2 мкм в геле при комнатной температуре (). Пористость достигла 95 ± 1%.
Последний процесс промывки водой удалил кристаллы льда и создал гель PNIPAAm с непрерывно выровненными микроканалами (). Полученный гель имел средний диаметр микроканалов ~ 20 ± 4 мкм и среднюю толщину стенки 0,2 мкм в геле при комнатной температуре (). Пористость достигла 95 ± 1%.
( A ) Схема, иллюстрирующая процесс изготовления геля с анизотропно выровненными микроканалами.Гель получают путем направленной кристаллизации и последующей полимеризации. ( B ) Фотография полученного микроканалированного гидрогеля после набухания в воде. ( C ) Микроструктура геля: (C-1) микрофотография верхней поверхности, полученная с помощью сканирующей электронной микроскопии (SEM), (C-2) трехмерное изображение микроканалированного гидрогеля с помощью микрокомпьютерной томографии (микро-КТ) и (C-3) СЭМ-микрофотография микроканалов, которые соединяют верх и низ геля. ( D ) СОЭ гелей при разных температурах.( E ) Модули упругости гелей при сжатии. Образцы сжимали параллельно направлению микроканала (осевое сжатие) и перпендикулярно направлению микроканала (радиальное сжатие). ( F ) Зависящие от времени изменения объема микроканалированного геля при нагревании (F-1) и охлаждении (F-2). Образцы помещали на пластину при 40 ° или 25 ° C. Результирующее изменение объема регистрировали. ( G ) Эффективный коэффициент диффузии воды в гелях, определяемый количественно по графику повторного заполнения (F-2).* представляет собой статистическую значимость разницы значений между условиями, указанными линией (* P <0,01). Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
( D ) СОЭ гелей при разных температурах.( E ) Модули упругости гелей при сжатии. Образцы сжимали параллельно направлению микроканала (осевое сжатие) и перпендикулярно направлению микроканала (радиальное сжатие). ( F ) Зависящие от времени изменения объема микроканалированного геля при нагревании (F-1) и охлаждении (F-2). Образцы помещали на пластину при 40 ° или 25 ° C. Результирующее изменение объема регистрировали. ( G ) Эффективный коэффициент диффузии воды в гелях, определяемый количественно по графику повторного заполнения (F-2).* представляет собой статистическую значимость разницы значений между условиями, указанными линией (* P <0,01). Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
Для сравнения, произвольно ориентированные кристаллы воды были созданы в геле PNIPAAm путем помещения предварительно желатинированного раствора NIPAAm в морозильную камеру при -25 ° C и отверждения его под УФ-светом. Полученный гидрогель показал пористость, аналогичную гелю PNIPAAm, полученному путем направленной кристаллизации.Однако микроканалы разного диаметра были ориентированы случайным образом (рис. S1). Кроме того, гель PNIPAAm, свободный от микроканалов, был приготовлен путем пропуска стадии кристаллизации.
Полученный гидрогель показал пористость, аналогичную гелю PNIPAAm, полученному путем направленной кристаллизации.Однако микроканалы разного диаметра были ориентированы случайным образом (рис. S1). Кроме того, гель PNIPAAm, свободный от микроканалов, был приготовлен путем пропуска стадии кристаллизации.
Мы исследовали равновесные коэффициенты набухания (СОЭ) полученных гелей. Все образцы показали изменение объемного набухания примерно при 32 ° C, что соответствует более низкой критической температуре раствора (НКТР) PNIPAAm (). Разница в ESR между 25 ° и 35 ° C зависела от микроканальной архитектуры геля.В частности, гели с анизотропно выровненными микроканалами показали коэффициент набухания в 2,7 раза выше, чем гели со случайно ориентированными микроканалами, и в 1,4 раза более высокий коэффициент набухания, чем гели без микроканалов. Модуль упругости геля с анизотропно выровненными микроканалами зависел от направления микроканалов (). Модуль упругости, измеренный при сжатии геля перпендикулярно микроканалу, составил 2,4 кПа, что в два раза ниже, чем измеренный при сжатии геля параллельно микроканалам. Напротив, гель со случайно ориентированными микроканалами и гель без микроканалов показали минимальную зависимость модуля упругости от направления сжатия.
Напротив, гель со случайно ориентированными микроканалами и гель без микроканалов показали минимальную зависимость модуля упругости от направления сжатия.
Затем мы исследовали степень, в которой микроканальная архитектура геля модулирует скорость объемного набухания в ответ на изменение температуры. Гель без микроканалов демонстрировал минимальное изменение объема за 10 с при повышении температуры от 25 ° до 40 ° C. Напротив, гель с анизотропно выровненными микроканалами уменьшил свой объем на 60% в течение 10 с при повышении температуры до 40 ° C (и фильм S1).Эта усадка, вызванная нагревом, объясняется уменьшением среднего диаметра поперечного сечения микроканалов с 20 до 9 мкм, что было исследовано с помощью изображений, полученных с помощью сканирующего электронного микроскопа (рис. S2). Выравнивание микроканалов сохранялось во время усадки. Гель со случайно ориентированными микроканалами также сжимался в течение 10 с при повышении температуры до 40 ° C (). Однако степень усадки составляла примерно 0,4, что на 20% ниже, чем у геля с анизотропно выровненными микроканалами. Электронно-микроскопические изображения показали множество открытых пустот, а также неполное схлопывание микропор (рис. S3). Напротив, гель с выровненными микроканалами демонстрировал более равномерное уменьшение диаметра микроканала и минимальные пустоты макро-размера после нагревания (рис. S2). Этот результат показывает, что микропоры различного диаметра и ориентации ограничивают вызванное нагреванием коллапс, что приводит к уменьшению объемной усадки.
Электронно-микроскопические изображения показали множество открытых пустот, а также неполное схлопывание микропор (рис. S3). Напротив, гель с выровненными микроканалами демонстрировал более равномерное уменьшение диаметра микроканала и минимальные пустоты макро-размера после нагревания (рис. S2). Этот результат показывает, что микропоры различного диаметра и ориентации ограничивают вызванное нагреванием коллапс, что приводит к уменьшению объемной усадки.
Охлаждение геля от 40 ° до 25 ° C привело к расширению геля.Скорость и степень объемного расширения зависели от архитектуры микроканала. Гель без микроканалов не восстановил свой первоначальный объем даже через 1 час (и рис. S4). Напротив, оба геля с микроканалами восстанавливали свой первоначальный объем в течение 10 с из-за повторного набухания. График повторного заполнения, отображаемый в, был использован для количественной оценки эффективного коэффициента диффузии воды (). Мы использовали уравнение Хигучи, полученное в рамках стационарного приближения закона диффузии Фика: ( 20 )
Vt = V25 · (S / V40) · (D ′ · t / π) 1/2
( 1)
, где V t — объем геля в момент времени t , D ′ — эффективный коэффициент диффузии, а S — эффективная площадь поверхности. V 40 и V 25 — объем геля при 40 ° C и 25 ° C соответственно. Мы предположили, что диффузия воды происходит исключительно по поверхности геля. Гели с анизотропными микроканалами имели скорость диффузии воды в 75 раз выше, чем гель без микроканалов (). Кроме того, гель с анизотропно ориентированными микроканалами показал на 10% более высокую скорость диффузии воды, чем гель с произвольно ориентированными микроканалами.
V 40 и V 25 — объем геля при 40 ° C и 25 ° C соответственно. Мы предположили, что диффузия воды происходит исключительно по поверхности геля. Гели с анизотропными микроканалами имели скорость диффузии воды в 75 раз выше, чем гель без микроканалов (). Кроме того, гель с анизотропно ориентированными микроканалами показал на 10% более высокую скорость диффузии воды, чем гель с произвольно ориентированными микроканалами.
Отдельно был изготовлен гибкий электрический (джоулевый) нагреватель для прикрепления к гелю путем фотолитографического моделирования пленки медь / полиимид (толщина 9 мкм медь / 12 мкм полиимид).Ширина линий и шаг медного рисунка поддерживались на уровне 300 мкм для обеспечения равномерного нагрева гелевого диска (). Нагреватель был дополнительно покрыт слоем олова толщиной ~ 1 мкм для предотвращения окисления меди при повышенной температуре во влажной среде. Затем нагреватель был подключен к внешнему источнику питания с диапазоном напряжения от 2 до 5 В (). Активированная температура была исследована с помощью инфракрасной камеры, показав, что нагреватель достиг заданной температуры 37 ° C в течение 5 с после подачи напряжения 2 В ().После отключения питания температура сразу же упала до 25 ° C. Такой электротермический нагреватель прикрепляли к гелевому диску с помощью клея на основе цианоакрилата ( 21 ). Конструкция двухслойного гидрогелевого нагревателя наконец была прикреплена к трехмерной (3D) печатной опоре ().
Активированная температура была исследована с помощью инфракрасной камеры, показав, что нагреватель достиг заданной температуры 37 ° C в течение 5 с после подачи напряжения 2 В ().После отключения питания температура сразу же упала до 25 ° C. Такой электротермический нагреватель прикрепляли к гелевому диску с помощью клея на основе цианоакрилата ( 21 ). Конструкция двухслойного гидрогелевого нагревателя наконец была прикреплена к трехмерной (3D) печатной опоре ().
( A ) Фотография (вверху) и тепловое изображение гибкого нагревателя, снятое с помощью инфракрасной камеры (внизу).( B ) Изменение температуры с течением времени при различных приложенных напряжениях. Температурные профили нагревателя были получены с помощью инфракрасной камеры. ( C ) Структурная конфигурация мягкого манипулятора (слева) и фотография мягкого манипулятора (справа). ( D и E ) Вверху: Снимки микроканалированного геля в мягком манипуляторе при включении (D) и выключении (E) нагревателя. Изображения во втором ряду представляют собой оптические микроскопические изображения поверхности геля при включении и выключении нагревателя.Когда нагреватель был включен, выровненные микроканалы геля выталкивали воду, будучи закрытыми на 20 с (D). Когда нагреватель был выключен, гель в мягком манипуляторе открывал микроканалы и втягивал воду обратно в микроканалы в течение 20 с (E). Шкала 100 мкм. Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
( D и E ) Вверху: Снимки микроканалированного геля в мягком манипуляторе при включении (D) и выключении (E) нагревателя. Изображения во втором ряду представляют собой оптические микроскопические изображения поверхности геля при включении и выключении нагревателя.Когда нагреватель был включен, выровненные микроканалы геля выталкивали воду, будучи закрытыми на 20 с (D). Когда нагреватель был выключен, гель в мягком манипуляторе открывал микроканалы и втягивал воду обратно в микроканалы в течение 20 с (E). Шкала 100 мкм. Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
С помощью полученного электротермического мягкого манипулятора мы исследовали реакцию гелевого диска на электрический сигнал. Тест проводился вне воды.показан вид сбоку гелевого диска и микроструктурные изменения поверхности геля во время электрически контролируемого цикла нагрева и охлаждения. Включение нагревателя вызывало усадку микроканалов в течение 10–20 с и одновременно высвобождало часть воды из геля (и пленки S2). При отключении питания гель расширил микроканалы и реабсорбировал воду в течение нескольких секунд (и фильм S2). Сжатие и расширение микроканалов можно было повторить сотни раз, включая и выключая питание.При повторной операции структурного разрушения геля не наблюдалось. Далее мы исследовали теплопередачу через слой геля, помещенный на нагреватель, при температуре 40 ° C (рис. S5A и фильм S3). При включенном нагревателе температура геля быстро увеличивалась снизу (точка 1 на рис. S5B) к верху (точка 4 на рис. S5B) в течение 20 с. Этот результат подтверждает распространение тепла в направлении толщины геля. Температура геля увеличивалась со скоростью 0,3 ° C / мм · с, независимо от области наблюдения.Наконец, температура всего геля сравнялась с температурой нагревателя в течение 30 с (рис. S5C).
При отключении питания гель расширил микроканалы и реабсорбировал воду в течение нескольких секунд (и фильм S2). Сжатие и расширение микроканалов можно было повторить сотни раз, включая и выключая питание.При повторной операции структурного разрушения геля не наблюдалось. Далее мы исследовали теплопередачу через слой геля, помещенный на нагреватель, при температуре 40 ° C (рис. S5A и фильм S3). При включенном нагревателе температура геля быстро увеличивалась снизу (точка 1 на рис. S5B) к верху (точка 4 на рис. S5B) в течение 20 с. Этот результат подтверждает распространение тепла в направлении толщины геля. Температура геля увеличивалась со скоростью 0,3 ° C / мм · с, независимо от области наблюдения.Наконец, температура всего геля сравнялась с температурой нагревателя в течение 30 с (рис. S5C).
Гель со случайно ориентированными микроканалами также подвергался усадке и расширению в ответ на электротермический сигнал. Однако область, подверженная сжатию и расширению микроканала, не была такой однородной, как в геле с анизотропно выровненными микроканалами (рис. S6). Таким образом, гель локально выделял воду. Гель без микроканалов показал очень медленное выделение и ограниченное поглощение воды при включенном и выключенном электронагревателе соответственно (рис.S7).
S6). Таким образом, гель локально выделял воду. Гель без микроканалов показал очень медленное выделение и ограниченное поглощение воды при включенном и выключенном электронагревателе соответственно (рис.S7).
Усадка и расширение анизотропно выровненных микроканалов позволили гелю захватывать, поднимать и высвобождать интересующие материалы (и фильмы S4 и S5). В работе использовался манипулятор диаметром 25 мм. Процесс манипуляции проводился следующим образом. Сначала мы сжали верхнюю часть микроканалов гидрогеля, активировав нагреватель (ступень 1 в). Во время этого процесса гель высвобождает часть воды, тем самым создавая пустой карман между нагревателем и остаточной водой в микроканалах.Затем гель помещали на силиконовую пластину диаметром 4 дюйма, модельный материал, который необходимо транспортировать (стадия 2 дюйма). Затем нагреватель был отключен, чтобы расширить усохшие микроканалы и переместить остаточную воду вверх [стадия 3 (i) в]. Образовавшееся впоследствии свободное пространство между водой внутри микроканалов и кремниевой пластиной уменьшало давление внутри микроканалов, тем самым заставляя гель прилипать к кремниевой подложке. Таким образом, мягкий манипулятор может поднять субстрат [этап 3 (ii) в].Наконец, при включении питания микроканалы, прилегающие к нагревателю, сжимались и выталкивали воду из микроканала (этап 4). Последующее повышение давления внутри микроканалов служило для быстрого удаления кремниевой пластины. Этот механизм отличается от искусственных систем манипулирования, созданных на основе анатомии присоски головоногих моллюсков. Однако эти системы манипулирования требуют внешней силы для удержания и высвобождения интересующих материалов. Напротив, процесс манипуляции, выполняемый нашим мягким манипулятором, напоминает нервно-мышечную активацию, при которой головоногие моллюски захватывают и высвобождают интересующие материалы.Благодаря контролю над электричеством быстрое электротермическое срабатывание геля позволило манипулятору систематически поднимать и выпускать целевые материалы без внешних сил.
Таким образом, мягкий манипулятор может поднять субстрат [этап 3 (ii) в].Наконец, при включении питания микроканалы, прилегающие к нагревателю, сжимались и выталкивали воду из микроканала (этап 4). Последующее повышение давления внутри микроканалов служило для быстрого удаления кремниевой пластины. Этот механизм отличается от искусственных систем манипулирования, созданных на основе анатомии присоски головоногих моллюсков. Однако эти системы манипулирования требуют внешней силы для удержания и высвобождения интересующих материалов. Напротив, процесс манипуляции, выполняемый нашим мягким манипулятором, напоминает нервно-мышечную активацию, при которой головоногие моллюски захватывают и высвобождают интересующие материалы.Благодаря контролю над электричеством быстрое электротермическое срабатывание геля позволило манипулятору систематически поднимать и выпускать целевые материалы без внешних сил.
( A ) Снимки, показывающие транспортировку кремниевой пластины диаметром 4 дюйма с помощью мягкого манипулятора (верхние изображения). Схема, показывающая сжатие и расширение микроканалов и последующее движение воды в микроканалах, контролируемое электротермическим сигналом (нижние изображения).Рабочая мощность мягкого манипулятора составляла 5 Вт. ( B ) Зависимое от времени изменение нормальной прочности сцепления, измеренное динамическим механическим анализатором (DMA) во время стадий 2 и 3 в (A). Для этого измерения к мягкому манипулятору прилагалась начальная контактная сила 0,05 кПа. ( C ) Флуоресцентные изображения воды в микроканалах геля. Изображение было получено с помощью конфокального микроскопа 3D z до (вверху) и после прикрепления (внизу) мягкого манипулятора к целевой поверхности.Нагреватель был прикреплен к верхней части геля. ( D ) Зависимость прочности сцепления от начальной нагрузки. ( E ) Изменение силы сцепления в зависимости от номера цикла. ( F ) Сила адгезии мягкого манипулятора, измеренная с различными целевыми субстратами в воде и воздухе.
Схема, показывающая сжатие и расширение микроканалов и последующее движение воды в микроканалах, контролируемое электротермическим сигналом (нижние изображения).Рабочая мощность мягкого манипулятора составляла 5 Вт. ( B ) Зависимое от времени изменение нормальной прочности сцепления, измеренное динамическим механическим анализатором (DMA) во время стадий 2 и 3 в (A). Для этого измерения к мягкому манипулятору прилагалась начальная контактная сила 0,05 кПа. ( C ) Флуоресцентные изображения воды в микроканалах геля. Изображение было получено с помощью конфокального микроскопа 3D z до (вверху) и после прикрепления (внизу) мягкого манипулятора к целевой поверхности.Нагреватель был прикреплен к верхней части геля. ( D ) Зависимость прочности сцепления от начальной нагрузки. ( E ) Изменение силы сцепления в зависимости от номера цикла. ( F ) Сила адгезии мягкого манипулятора, измеренная с различными целевыми субстратами в воде и воздухе. Начальная сила контакта 0,5 кПа была приложена к мягкому манипулятору с использованием прямого доступа к памяти для этого измерения. Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
Начальная сила контакта 0,5 кПа была приложена к мягкому манипулятору с использованием прямого доступа к памяти для этого измерения. Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
Нормальное развитие давления геля на поверхность кремния было дополнительно измерено, особенно на стадиях 2 и 3. Это измерение проводилось путем присоединения конструкции двухслойного нагревателя геля к динамическому механическому анализатору (DMA) (). Сначала гель был предварительно нагрет нагревателем и приведен в контакт с 4-дюймовой кремниевой пластиной (этап «Приближение»). Затем при отключении питания для расширения микроканалов нагрузка увеличивалась в отрицательном направлении на 25 с (стадия «Расширение геля»).Эту двухслойную конструкцию гелевого нагревателя затем медленно подтягивали вверх со скоростью 0,1 мм / с с помощью прямого доступа к памяти для наблюдения за увеличением прочности адгезии (стадия «адгезия» в). Максимальная сила сцепления достигала 1,5 кПа. После включения питания до того, как напряжение достигло 1,5 кПа, нормальная сила сцепления быстро снизилась до 0 кПа в течение 5 с (этап «разгрузки»).
После включения питания до того, как напряжение достигло 1,5 кПа, нормальная сила сцепления быстро снизилась до 0 кПа в течение 5 с (этап «разгрузки»).
Без контроля температуры манипулятор не проявляет адгезии. Мы также исследовали, являются ли вызванные температурой сокращение и расширение микроканалов существенными для создания адгезии.Мягкий манипулятор, предварительно нагретый до 37 ° C, помещали на кремниевую пластину, погруженную в воду с контролируемой температурой. Затем нагреватель мягкого манипулятора был выключен. При температурах ниже НКТС гелевого слоя (т.е. ~ 32 ° C) сила адгезии быстро возрастает с понижением температуры (рис. S8). Этот результат подтверждает, что температура нагревающего слоя в манипуляторе контролирует степень расширения микроканалированного гелевого слоя и, в свою очередь, регулирует прочность сцепления.
Мы предполагаем, что адгезия геля к кремниевой пластине, контролируемая электротермическим способом, является результатом разницы давлений (∆ P ) между двумя концами микроканалов. Мы вводили смесь родамина B и воды в микроканалы геля и отслеживали вертикальное движение воды через индивидуальный микроканал во время стадии 3 (i) в. Согласно виду сбоку геля, полученному с помощью конфокальной микроскопии, микроканалированный гелевый диск был полностью заполнен водой (вверху).Нагрев и последующий процесс охлаждения привели к образованию пространства в нижней части микроканала, прилегающего к кремниевой подложке, за счет перемещения остаточной воды вверх по микроканалам (, внизу). Это изображение похоже на схему, представляющую этап 3 в. Средняя высота пространства в микроканале составляла примерно 50 мкм. Перепад давления одного микроканала в геле количественно определялся высотой пустой части микроканала следующим образом:
Мы вводили смесь родамина B и воды в микроканалы геля и отслеживали вертикальное движение воды через индивидуальный микроканал во время стадии 3 (i) в. Согласно виду сбоку геля, полученному с помощью конфокальной микроскопии, микроканалированный гелевый диск был полностью заполнен водой (вверху).Нагрев и последующий процесс охлаждения привели к образованию пространства в нижней части микроканала, прилегающего к кремниевой подложке, за счет перемещения остаточной воды вверх по микроканалам (, внизу). Это изображение похоже на схему, представляющую этап 3 в. Средняя высота пространства в микроканале составляла примерно 50 мкм. Перепад давления одного микроканала в геле количественно определялся высотой пустой части микроканала следующим образом:
, где ρ w — плотность воды, g — ускорение свободного падения и h i и h f — высота пространства в микроканалах при включении и выключении питания соответственно.Согласно расчету, каждый микроканал в геле создавал отрицательное давление 0,5 Па после процесса охлаждения.
Прочность адгезии геля к кремниевой пластине зависела от начальной нагрузки, приложенной к мягкому манипулятору (). Максимальная сила сцепления достигла 65 кПа при начальном давлении 5,0 кПа. Максимальная сила сцепления достигла 65 кПа при начальном давлении 5,0 кПа. Чтобы заложить основу механизма, мы исследовали развитие нормального давления, которое изменяется с начальным контактным давлением, используя прямой доступ к памяти.Как показано на рис. S9A нагретый мягкий манипулятор размещался на целевой кремниевой пластине. Как только нагреватель был выключен, слой геля расширялся и сильнее давил на силиконовую пластину. Как следствие, нормальное давление развивалось в обратном направлении. Нормальное давление увеличивалось с начальным контактным давлением (рис. S9B). Увеличение начального контактного давления увеличивало эффективную площадь всасывания мягкого манипулятора, а также увеличивало нормальное давление.
Мы также исследовали влияние модуля упругости целевых материалов на прочность сцепления. Мы приготовили альгинатные гидрогели с модулями упругости 22,5 и 69,8 кПа в качестве целевых материалов для транспорта (рис. S10A). Как подтверждено профилями развития давления, при заданном начальном контактном давлении 0,25 кПа мягкий манипулятор продемонстрировал аналогичную величину прочности сцепления с альгинатными гелями, а также с кремниевой пластиной с гораздо более высоким модулем упругости от 140 до 180 ГПа. . Этот результат предполагает, что нет необходимости изменять начальное контактное давление в зависимости от жесткости целевого материала (рис.S10B). Прочность сцепления не снижалась при повторных циклах закрытия и открытия микроканалов (). После обработки на силиконовой пластине не было обнаружено химического загрязнения или остатков (рис. S11). Мягкий манипулятор может транспортировать пластмассовые и стеклянные материалы, проявляя одинаковую величину прочности сцепления независимо от гидрофобности материала (). Мягкий манипулятор предназначен для транспортировки материалов, погруженных в водную среду и находящихся в воздухе.
Мы приготовили альгинатные гидрогели с модулями упругости 22,5 и 69,8 кПа в качестве целевых материалов для транспорта (рис. S10A). Как подтверждено профилями развития давления, при заданном начальном контактном давлении 0,25 кПа мягкий манипулятор продемонстрировал аналогичную величину прочности сцепления с альгинатными гелями, а также с кремниевой пластиной с гораздо более высоким модулем упругости от 140 до 180 ГПа. . Этот результат предполагает, что нет необходимости изменять начальное контактное давление в зависимости от жесткости целевого материала (рис.S10B). Прочность сцепления не снижалась при повторных циклах закрытия и открытия микроканалов (). После обработки на силиконовой пластине не было обнаружено химического загрязнения или остатков (рис. S11). Мягкий манипулятор может транспортировать пластмассовые и стеклянные материалы, проявляя одинаковую величину прочности сцепления независимо от гидрофобности материала (). Мягкий манипулятор предназначен для транспортировки материалов, погруженных в водную среду и находящихся в воздухе.
Наконец, мы исследовали способность мягкого манипулятора поднимать, транспортировать и высвобождать ультратонкие и деликатные материалы, такие как живые клеточные листы и ультратонкие тонкопленочные устройства.Мы подготовили однослойный лист скелетных миобластных клеток мыши на культуральной чашке. В общем, однослойные клеточные листы легко повреждались или сминались при извлечении листа из чашки для культивирования клеток с помощью щипцов (и пленки S6). Путем включения и выключения нагревателя мягкого манипулятора можно было поднимать лист миобластных клеток и транспортировать их к новым целевым сайтам. Сначала мы перенесли клеточный лист в стеклянную посуду с помощью мягкого манипулятора (). Затем мы исследовали, не повреждает ли мягкий манипулятор лист при трансплантации.Внеосевую деформацию и жизнеспособность клеточного листа до и после процесса доставки измеряли с помощью пространственной световой интерференционной микроскопии (SLIM) и набора для анализа живых мертвецов, соответственно. Согласно наблюдениям SLIM и результатам анализа живых мертвецов, не было ни существенного сморщивания, ни потери жизнеспособности клеток, которые сформировали клеточный лист во время этого процесса транспортировки (и рис. S12). Этот простой процесс транспортировки позволил нам изготовить трехмерную ткань, сложив несколько листов миобластов с помощью мягкого манипулятора ().Полученная трехслойная ткань миобластов представляет собой плотную конструкцию с тремя различными слоями.
Согласно наблюдениям SLIM и результатам анализа живых мертвецов, не было ни существенного сморщивания, ни потери жизнеспособности клеток, которые сформировали клеточный лист во время этого процесса транспортировки (и рис. S12). Этот простой процесс транспортировки позволил нам изготовить трехмерную ткань, сложив несколько листов миобластов с помощью мягкого манипулятора ().Полученная трехслойная ткань миобластов представляет собой плотную конструкцию с тремя различными слоями.
( A ) Снимки процесса извлечения листа скелетных миобластов с помощью щипцов. Лист ячеек деформировался при захвате листа щипцами (справа). Клеточный лист окрашивали метиленовым синим для визуализации. ( B ) Снимок процесса транспортировки листа скелетных миобластов на стеклянную поверхность с помощью мягкого манипулятора.( C ) Изображения с помощью пространственной световой интерференционной микроскопии (SLIM) клеточного листа до (слева) и после (справа) переноса, демонстрирующие внеосевую дифракцию клеточного листа. ( D ) Флуоресцентное изображение многослойного клеточного листа, состоящего из трех разных листов миобластов. Многослойный лист был приготовлен путем укладки ячеистых листов с помощью мягкого манипулятора. ( E ) Снимки процесса транспортировки листа скелетных миобластов на мышечную ткань. На весь процесс передачи ушло 30 с.( F ) Фотографии глаза крысы до и после трансплантации листа стволовых клеток. Клеточный лист трансплантировали в эпителий роговицы глаза крысы с помощью мягкого манипулятора. На весь процесс передачи ушло 30 с. ( G ) Гистологическое исследование глаза крысы до (слева) и после (справа) переноса листа стволовых клеток. Окрашивание гематоксилином и эозином показало, что лист стволовых клеток можно успешно трансплантировать на переднюю поверхность роговицы без существенного образования межфазного пространства.Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
( D ) Флуоресцентное изображение многослойного клеточного листа, состоящего из трех разных листов миобластов. Многослойный лист был приготовлен путем укладки ячеистых листов с помощью мягкого манипулятора. ( E ) Снимки процесса транспортировки листа скелетных миобластов на мышечную ткань. На весь процесс передачи ушло 30 с.( F ) Фотографии глаза крысы до и после трансплантации листа стволовых клеток. Клеточный лист трансплантировали в эпителий роговицы глаза крысы с помощью мягкого манипулятора. На весь процесс передачи ушло 30 с. ( G ) Гистологическое исследование глаза крысы до (слева) и после (справа) переноса листа стволовых клеток. Окрашивание гематоксилином и эозином показало, что лист стволовых клеток можно успешно трансплантировать на переднюю поверхность роговицы без существенного образования межфазного пространства.Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
Мягкий манипулятор позволил нам захватывать различные типы клеточных листов и быстро доставлять их на любые целевые поверхности. В качестве демонстрации мы доставили лист миобластных клеток в мышечную ткань ex vivo без каких-либо структурных разрывов (и фильм S7). Весь процесс транспортировки мог быть завершен за 30 секунд. Напротив, мягкий манипулятор, собранный из геля со случайно ориентированными микропорами, не может равномерно доставить клеточный лист из-за неоднородной усадки микропор (рис.S13). Мы также использовали мягкий манипулятор в качестве устройства для поддержки атравматической трансплантации листа стволовых клеток на переднюю поверхность роговицы. Подобно листу миобластных клеток, листы мезенхимальных стволовых клеток на донорском субстрате могут быть легко перенесены на эпителий роговицы глаза крысы (2). Мы подтвердили стабильное прикрепление листа стволовых клеток к передней поверхности роговицы в положении эпителия роговицы глаза крысы путем гистологического наблюдения (). Метод атравматической трансплантации листов стволовых клеток, созданных ex vivo, может упростить хирургическую технику и расширить доступ к трансплантатам эпителиальных стволовых клеток роговицы, а также может найти полезное применение при лечении повреждений эпителия роговицы, стойких эпителиальных дефектов, дефицита лимбальных стволовых клеток, незаживающих язв роговицы.
В качестве демонстрации мы доставили лист миобластных клеток в мышечную ткань ex vivo без каких-либо структурных разрывов (и фильм S7). Весь процесс транспортировки мог быть завершен за 30 секунд. Напротив, мягкий манипулятор, собранный из геля со случайно ориентированными микропорами, не может равномерно доставить клеточный лист из-за неоднородной усадки микропор (рис.S13). Мы также использовали мягкий манипулятор в качестве устройства для поддержки атравматической трансплантации листа стволовых клеток на переднюю поверхность роговицы. Подобно листу миобластных клеток, листы мезенхимальных стволовых клеток на донорском субстрате могут быть легко перенесены на эпителий роговицы глаза крысы (2). Мы подтвердили стабильное прикрепление листа стволовых клеток к передней поверхности роговицы в положении эпителия роговицы глаза крысы путем гистологического наблюдения (). Метод атравматической трансплантации листов стволовых клеток, созданных ex vivo, может упростить хирургическую технику и расширить доступ к трансплантатам эпителиальных стволовых клеток роговицы, а также может найти полезное применение при лечении повреждений эпителия роговицы, стойких эпителиальных дефектов, дефицита лимбальных стволовых клеток, незаживающих язв роговицы. , и взрывные травмы ( 22 , 23 ).
, и взрывные травмы ( 22 , 23 ).
Кроме того, мягкий манипулятор использовался для транспортировки ультратонкого электрофизиологического (ЭФ) сенсора (толщиной ~ 1 мкм) без образования складок. Мы изготовили датчик EP, который состоит из электродов сравнения, заземления и измерения, позволяющих качественно регистрировать сигналы электрокардиограммы (ЭКГ) () ( 24 , 25 ). Как правило, такие ультратонкие пленочные устройства легко сминались при снятии с донорской подложки, что обычно требует использования временной опоры для переноски (рис.S14 и фильм S8). Используя мягкий манипулятор, можно было контролируемым образом перенести датчик EP с донорской подложки на поверхность сердца свиньи в течение минуты (и фильм S9). После транспортировки существенных морщин не наблюдалось (). Генератор сигналов использовался для подачи заранее запрограммированных сигналов ЭКГ через сердце свиньи с использованием электрода Ag / AgCl. Результирующие сигналы ЭКГ, полученные от датчика EP, были почти идентичны сигналам, генерируемым генератором сигналов (и рис. S15). Коэффициент корреляции сигналов Пирсона составлял 0,98.
S15). Коэффициент корреляции сигналов Пирсона составлял 0,98.
( A ) Конфигурация устройства сверхтонкого датчика EP ( t = 1 мкм), предназначенного для измерения сигналов ЭКГ. ( B ) Снимок процесса транспортировки устройства на поверхность сердца свиньи. Захват и доставка устройства на сердце свиньи заняли 30 с. ( C ) Фотография устройства, трансплантированного в сердце свиньи с помощью мягкого манипулятора.( D ) Типичные сигналы ЭКГ, измеренные с помощью трансплантированного устройства. Фотография предоставлена: Byoungsoo Kim, Университет штата Иллинойс в Урбана-Шампейн.
Вместе это исследование демонстрирует, что мягкий манипулятор, собранный путем интеграции быстро реагирующего на нагрев микроканалированного геля и электротермического нагревателя, может быстро и безопасно транспортировать ультратонкие биологические и электронные материалы. В результате получается мягкий манипулятор, который можно включать и выключать с помощью электричества, чтобы поднимать и высвобождать тонкие и хрупкие материалы за десятки секунд.Такое быстрое обращение может быть достигнуто с помощью электротермического контролируемого изменения силы сцепления между мягким манипулятором и целевым материалом. Такой механизм срабатывания очень похож на мышечное действие присосок головоногих. Таким образом, этот мягкий манипулятор отличается от предыдущих платформ, имитирующих присоски, которым требуется внешнее усилие для отделения материалов. Кроме того, мягкий манипулятор может перемещать интересующие тонкие материалы как во влажных, так и в сухих условиях. Используя эту уникальную функциональность, мы могли собирать многослойные клеточные листы и помещать ультратонкий биосенсор в ткань-мишень, не нарушая его функции.
В результате получается мягкий манипулятор, который можно включать и выключать с помощью электричества, чтобы поднимать и высвобождать тонкие и хрупкие материалы за десятки секунд.Такое быстрое обращение может быть достигнуто с помощью электротермического контролируемого изменения силы сцепления между мягким манипулятором и целевым материалом. Такой механизм срабатывания очень похож на мышечное действие присосок головоногих. Таким образом, этот мягкий манипулятор отличается от предыдущих платформ, имитирующих присоски, которым требуется внешнее усилие для отделения материалов. Кроме того, мягкий манипулятор может перемещать интересующие тонкие материалы как во влажных, так и в сухих условиях. Используя эту уникальную функциональность, мы могли собирать многослойные клеточные листы и помещать ультратонкий биосенсор в ткань-мишень, не нарушая его функции.
Мы предполагаем, что дальнейшая модификация этого мягкого манипулятора с электронным датчиком позволит роботам автономно транспортировать ультратонкие материалы. Например, полученный интеллектуальный мягкий манипулятор сможет отслеживать степень деформации транспортируемых материалов во время контакта и, в свою очередь, регулировать силу всасывания до уровня, при котором материалы сохраняют свою структурную целостность и функциональность. Таким образом, мягкий манипулятор улучшит свои характеристики с точки зрения безопасности и точности погрузочно-разгрузочных работ и сборки.Мы полагаем, что настоящая концепция дизайна может быть широко использована в качестве нового инструмента для мягкой обработки при изготовлении ультратонких пленочных устройств, тканевой инженерии и хирургии трансплантата.
Например, полученный интеллектуальный мягкий манипулятор сможет отслеживать степень деформации транспортируемых материалов во время контакта и, в свою очередь, регулировать силу всасывания до уровня, при котором материалы сохраняют свою структурную целостность и функциональность. Таким образом, мягкий манипулятор улучшит свои характеристики с точки зрения безопасности и точности погрузочно-разгрузочных работ и сборки.Мы полагаем, что настоящая концепция дизайна может быть широко использована в качестве нового инструмента для мягкой обработки при изготовлении ультратонких пленочных устройств, тканевой инженерии и хирургии трансплантата.
В этом исследовании было продемонстрировано электрически управляемое мягкое оборудование, используемое для транспортировки ультратонких, хрупких предметов, включая терапевтические клеточные пласты и тонкие носимые биосенсорные устройства. Эта система, получившая название электротермического мягкого манипулятора, состояла из гибкого нагревателя, прикрепленного к быстродействующему термочувствительному гидрогелевому диску PNIPAAm с контролируемой микроканальной архитектурой и мягкостью ткани. По сравнению с гидрогелями без микроканалов или с гидрогелями со случайно ориентированными микроканалами, анизотропно выровненный гидрогель PNIPAAm мог сжиматься и расширяться в ответ на электрически индуцированное тепло намного быстрее, порядка секунд. Такое быстрое изменение объема микроканалов на поверхности объекта может многократно вызывать и устранять адгезию, вызванную давлением. Этот управляемый механизм срабатывания аналогичен работе присосок головоногих, которые удерживают и высвобождают интересующие объекты с помощью биоэлектрических сигналов.Как следствие, мягкий манипулятор может быстро перемещать тонкие биологические и биоэлектронные устройства как во влажных, так и в сухих условиях, не вызывая складок или повреждения тонких материалов. Такой мягкий манипулятор с электротермическим управлением может быть полезен для различных приложений, требующих сложных манипуляций с хрупкими и нежными биологическими тканями и биоэлектронными устройствами.
По сравнению с гидрогелями без микроканалов или с гидрогелями со случайно ориентированными микроканалами, анизотропно выровненный гидрогель PNIPAAm мог сжиматься и расширяться в ответ на электрически индуцированное тепло намного быстрее, порядка секунд. Такое быстрое изменение объема микроканалов на поверхности объекта может многократно вызывать и устранять адгезию, вызванную давлением. Этот управляемый механизм срабатывания аналогичен работе присосок головоногих, которые удерживают и высвобождают интересующие объекты с помощью биоэлектрических сигналов.Как следствие, мягкий манипулятор может быстро перемещать тонкие биологические и биоэлектронные устройства как во влажных, так и в сухих условиях, не вызывая складок или повреждения тонких материалов. Такой мягкий манипулятор с электротермическим управлением может быть полезен для различных приложений, требующих сложных манипуляций с хрупкими и нежными биологическими тканями и биоэлектронными устройствами.
МАТЕРИАЛЫ И МЕТОДЫ
Приготовление микроканалированного геля PNIPAAm
NIPAAm (1. 25 г) и N , N ‘-метиленбисакриламид {12,5 мг [0,01 мас.% (Мас.%) NIPAAm]} растворяли в дистиллированной воде (8,75 мл) в течение 1 дня при 25 ° C для обеспечения полного растворения. . Затем к полученному раствору добавляли 25 мг (0,5 мас.% NIPAAm) радикального фотоинициатора (Irgacure 2959) и перемешивали до полного растворения всех твердых веществ. Полученный предварительно желатинированный раствор NIPAAm выливали на подложку из Si-вафли (4 дюйма, 550 мкм толщиной) с помощью силиконовой формы (50 мм на 50 мм на 1 мм или 20 мм на 20 мм на 10 мм).Затем подложку Si-пластины помещали в резервуар с жидким азотом для направленной кристаллизации предварительно желатинированного раствора NIPAAm. Расстояние между нижней поверхностью Si-пластины и верхней поверхностью жидкого азота составляло 1 см. После полной кристаллизации предварительно желатинированного раствора NIPAAm образцы облучали УФ-лампой (λ = 365 нм) в течение 6 часов в морозильной камере -25 ° C для радикальной криополимеризации.
25 г) и N , N ‘-метиленбисакриламид {12,5 мг [0,01 мас.% (Мас.%) NIPAAm]} растворяли в дистиллированной воде (8,75 мл) в течение 1 дня при 25 ° C для обеспечения полного растворения. . Затем к полученному раствору добавляли 25 мг (0,5 мас.% NIPAAm) радикального фотоинициатора (Irgacure 2959) и перемешивали до полного растворения всех твердых веществ. Полученный предварительно желатинированный раствор NIPAAm выливали на подложку из Si-вафли (4 дюйма, 550 мкм толщиной) с помощью силиконовой формы (50 мм на 50 мм на 1 мм или 20 мм на 20 мм на 10 мм).Затем подложку Si-пластины помещали в резервуар с жидким азотом для направленной кристаллизации предварительно желатинированного раствора NIPAAm. Расстояние между нижней поверхностью Si-пластины и верхней поверхностью жидкого азота составляло 1 см. После полной кристаллизации предварительно желатинированного раствора NIPAAm образцы облучали УФ-лампой (λ = 365 нм) в течение 6 часов в морозильной камере -25 ° C для радикальной криополимеризации. Затем предварительно приготовленный гель поли-НИПААм (PNIPAAm) трижды промывали пресной водой для удаления кристаллов льда.
Затем предварительно приготовленный гель поли-НИПААм (PNIPAAm) трижды промывали пресной водой для удаления кристаллов льда.
Для сравнения, гель PNIPAAm со случайно ориентированными микроканалами был приготовлен путем помещения предварительно желатинированного раствора NIPAAm в морозильную камеру при -25 ° C для случайной кристаллизации. Затем полученные образцы были криополимеризованы и промыты в тех же условиях, которые описаны выше. Гель PNIPAAm, свободный от микроканалов, получали путем пропуска кристаллизации и последующего облучения УФ-лампой в течение 1 часа при 4 ° C. Все образцы гидрогелей перед использованием замачивали в 250 мл дистиллированной воды при 25 ° C, которую неоднократно заменяли в течение 1 дня для удаления непрореагировавших примесей.
Характеристика гелей PNIPAAm
Морфологию микроканалированных гелей PNIPAAm исследовали с использованием сканирующего электронного микроскопа окружающей среды (ESEM; Quanta FEG 450, FEI) и микрокомпьютерной томографии (микро-КТ, MicroXCT-200, Xradia Inc. ). Для анализа поперечного сечения образцы были погружены в жидкий азот на 30 мин и сразу подверглись криогенному разрушению. Для определения среднего размера пор было взято сто точек из 10 различных изображений ESEM. Пористость гелей определяли гравиметрическим методом.Объем пор гелей был разделен на общий объем гелей следующим образом:
). Для анализа поперечного сечения образцы были погружены в жидкий азот на 30 мин и сразу подверглись криогенному разрушению. Для определения среднего размера пор было взято сто точек из 10 различных изображений ESEM. Пористость гелей определяли гравиметрическим методом.Объем пор гелей был разделен на общий объем гелей следующим образом:
Пористость (%) = {(Wswollen – Wdry) / ρw} / {(Wswollen – Wdry) / ρw + (Wdry / ρPNIPAAm)}
(3 )
, где W набухший и W сухой — масса набухшего и сухого гелей соответственно; ρ w — плотность воды; и ρ PNIPAAm — плотность NIPAAm (1,1 г / см 3 ).
Для измерения СОЭ мы измерили вес гелей PNIPAAm при различных температурах (от 4 ° до 40 ° C) с шагом 4 ° C.СОЭ определяли с помощью следующего уравнения:
СОЭ (%) = {(Ws – Wd) / Wd} · 100
(4)
Образцы гидрогеля уравновешивали при каждой температуре в течение 12 часов и взвешивали ( Вт s ) после удаления излишков воды. Сухую массу образцов ( W d ) измеряли после лиофилизации. Усредняли пять образцов каждого геля PNIPAAm.
Сухую массу образцов ( W d ) измеряли после лиофилизации. Усредняли пять образцов каждого геля PNIPAAm.
Для анализа динамической деформации гидрогелей в ответ на изменение температуры образцы гидрогелей, погруженные в 25 ° C, были обрезаны до цилиндрической формы ( d = 25 мм, t = 1 мм) и помещены на медную пластину ( t = 1 мм).Затем пластину помещали на нагретый столик Пельтье (40 ° C) для исследования кинетики вспучивания образцов. Для кинетики повторного набухания образцы с удаленным набуханием переносили на охлаждаемую ступень Пельтье (25 ° C). Мы отслеживали изменение объема в зависимости от температуры с помощью оптического микроскопа, подключенного к устройству Пельтье (TP104SC-mK2000A, Instec). Все оптические изображения были проанализированы с помощью программного обеспечения ImageJ.
Модуль сжатия гидрогелей измеряли на электронной универсальной испытательной машине (Instron 5943, Instron), снабженной водяной баней. Образцы вырезали квадратной формы (10 мм на 10 мм на 10 мм). Все механические испытания проводились на водяной бане (25 ° C). Для всех механических испытаний было пять повторов.
Образцы вырезали квадратной формы (10 мм на 10 мм на 10 мм). Все механические испытания проводились на водяной бане (25 ° C). Для всех механических испытаний было пять повторов.
Подготовка гибкого (джоулева) нагревателя
Нагреватель был изготовлен на пленке медь / полиимид ( т = 9 мкм / 12 мкм, Pyralux AC0EV, Dupont). Стандартное фотолитографическое нанесение рисунка сухим пленочным фоторезистом (Riston MM540, Dupont) с последующим методом влажного травления (CE-100, Transene Inc.) превратил медный слой в джоулевый нагревательный элемент. Следы меди были покрыты слоем олова (Sn) толщиной 1 мкм (421 Liquid Tin, MG Chemicals) для защиты меди от окисления при повышенных температурах во влажной среде. Затем полученный нагреватель был подключен к внешнему источнику питания, где диапазон напряжений от 2 до 5 В и его тепловые характеристики во времени регистрировались с помощью инфракрасной камеры (E40, FLIR Systems).
Изготовление мягкого манипулятора
Клей на основе цианоакрилата был нанесен поверх гибкой нагревательной решетки ( 21 ). Сразу после этого гидрогель был обрезан до цилиндрической формы ( d = 25 мм, t = 1 мм) и прижат к подложке. Склеивание происходит в течение 30 с. Полученный гель / нагреватель был прикреплен к 3D-печатной подложке с помощью двустороннего скотча (VHB, 3M). Затем мягкий манипулятор был подключен к источнику питания.
Сразу после этого гидрогель был обрезан до цилиндрической формы ( d = 25 мм, t = 1 мм) и прижат к подложке. Склеивание происходит в течение 30 с. Полученный гель / нагреватель был прикреплен к 3D-печатной подложке с помощью двустороннего скотча (VHB, 3M). Затем мягкий манипулятор был подключен к источнику питания.
Характеристика мягкого манипулятора
Для динамического анализа деформации мягкого манипулятора в ответ на активацию нагревателя монохромная камера (DS-Qi2, Nikon) была присоединена к оптическому микроскопу (Eclipse LV100, Nikon) для верхнего просмотр анализа геля в мягком манипуляторе.Для анализа вида сбоку мягкого манипулятора использовалась цифровая камера с макрообъективом с оптическим увеличением (Canon, MP-E 65 мм). Гели в мягком манипуляторе инкубировали с цветной водой (Green, McCormick) для визуализации воды.
Испытания на адгезию были выполнены с DMA (ESM303, Mark-10). Мягкий манипулятор был установлен на датчике нагрузки прямого доступа к памяти (M5-5 или M5-200, Mark-10), а скорость вертикального приближения и втягивания мягкого манипулятора составляла 0,1 мм / с. Профили смещения силы во времени измерялись при комнатной температуре.
Профили смещения силы во времени измерялись при комнатной температуре.
Чтобы изучить способность мягкого манипулятора работать с материалами с различными модулями упругости, в этом исследовании были использованы альгинатные гидрогели с модулями упругости 23 и 70 кПа. Предварительно желатинированный раствор альгината получали смешиванием 2 мас.% Раствора альгината в буфере MES (pH 6,5) с сульфированным N -гидроксисукцинимидом и 1-этил-3- (3-диметиламинопропил) карбодиимидом. Затем раствор предварительно желатинированного альгината подвергали поперечной сшивке путем добавления дигидразида адипиновой кислоты (AAD). Модуль упругости альгинатных гелей контролировали, варьируя молярное соотношение между AAD и уроновыми кислотами альгината ( M AAD ).
Флуоресцентные изображения поперечного сечения были получены из конфокальных изображений 3D z (LSM 880, Carl Zeiss). Мы использовали Родамин B, смешанный с водой, для отслеживания воды внутри мягкого манипулятора до и после процесса прикрепления.
Чтобы исследовать поверхностное загрязнение мягкого манипулятора, мы провели тесты на адгезию к кремниевым пластинам, используя либо мягкий манипулятор, либо коммерческую медицинскую ленту (Transpore, 3M). После отделения образцов полученную пластину инкубировали с красителем (родамином Б) в течение 30 мин.Всего все образцы промывали дистиллированной водой трижды. Затем мы высушили поверхность пластины, используя газ N 2 , а затем наблюдали за поверхностью пластины с помощью флуоресцентной оптической микроскопии.
Приготовление листов стволовых клеток
Клетки C2C12 (линия клеток скелетных миобластов мыши, CRL1772) и клетки D1 (линия мезенхимальных стволовых клеток костного мозга, {«type»: «entrez-protein», «attrs»: {» text «:» CRL12424 «,» term_id «:» 9983 «,» term_text «:» CRL12424 «}} CRL12424) были получены из Американской коллекции типовых культур (ATCC).Клетки C2C12 или D1 высевали на термочувствительные чашки с привитым PNIPAAm ( d = 35 мм, UpCell, Thermo Fisher Scientific) с плотностью посева 5 × 10 5 клеток. Затем клетки культивировали в течение 3 дней в соответствии с рекомендациями ATCC. Для сбора листов конфлюэнтные клетки дважды промывали нагретым фосфатно-солевым буфером Дульбекко (DPBS). Затем монослои отделяли от культуральной чашки, понижая температуру инкубации с 37 до 20 ° C.
Затем клетки культивировали в течение 3 дней в соответствии с рекомендациями ATCC. Для сбора листов конфлюэнтные клетки дважды промывали нагретым фосфатно-солевым буфером Дульбекко (DPBS). Затем монослои отделяли от культуральной чашки, понижая температуру инкубации с 37 до 20 ° C.
Анализ клеточных листов после транспортировки с использованием мягкого манипулятора
Жизнеспособность клеточных листов исследовали с использованием набора LIVE / DEAD Viability / Cytotoxicity Assay Kit для клеток млекопитающих (Invitrogen) в соответствии с инструкциями производителя. Культивированные клетки или перенесенные клетки осторожно промывали трижды DPBS. Ацетоксиметил кальцеина (AM) и гомодимер этидия-1 (EthD-1) разбавляли вместе в DPBS. К культивированным клеткам добавляли разбавленный кальцеин AM и раствор EthD-1 (1 мл) и выдерживали 45 мин при комнатной температуре.Живые клетки окрашивали кальцеином AM, а мертвые клетки окрашивали EthD-1. После окрашивания клетки осторожно промывали 1 × DPBS три раза и отображали с помощью флуоресцентного микроскопа (LSM-880, Carl Zeiss). Внеосевая деформация ячеистых листов до и после процесса доставки была количественно определена с помощью SLIM. Оптическая система была собрана путем присоединения модуля SLIM (CellVista SLIM Pro, Phi Optics) к выходному порту существующего инвертированного фазово-контрастного микроскопа ( 26 ).
Внеосевая деформация ячеистых листов до и после процесса доставки была количественно определена с помощью SLIM. Оптическая система была собрана путем присоединения модуля SLIM (CellVista SLIM Pro, Phi Optics) к выходному порту существующего инвертированного фазово-контрастного микроскопа ( 26 ).
Сборка многослойного клеточного листа с использованием мягкого манипулятора
Клетки C2C12 культивировали на чувствительной к температуре культуральной чашке для получения клеточных слоев, как описано выше. После инкубации конфлюэнтные клетки окрашивали Cell Tracker Orange CMRA (Invitrogen) или кальцеином AM (Invitrogen). Затем листы клеток отделяли от чашки для культивирования, понижая температуру инкубации с 37 ° до 20 ° C. Отделенные клеточные листы были захвачены и перенесены с помощью мягкого манипулятора с контролем электрического нагревателя.Многослойный клеточный лист был изготовлен путем повторения процедуры переноса. Полученную многослойную структуру ткани визуализировали с помощью флуоресцентного микроскопа (LSM-880, Carl Zeiss).
Трансплантация листа стволовых клеток на переднюю поверхность роговицы с помощью мягкого манипулятора.
В этом исследовании использовали крыс Long-Evans / BluGill. Все экспериментальные протоколы соответствовали Политике Службы общественного здравоохранения Национального института здравоохранения в отношении гуманного ухода и использования лабораторных животных и были одобрены Комитетом по уходу и использованию институциональных животных Университета Иллинойса в Урбане-Шампейне (UIUC).Для фиксации роговицы перфузионная игла вводилась в левый желудочек сердца. В правом предсердии был сделан разрез для эвакуации крови. Физический раствор вводили со скоростью 300 мл / мин, чтобы очистить кровь от крысы, с последующей инъекцией параформальдегида (PFA) со скоростью 300 мл / мин. Перфузия подтверждена проверкой капель PFA из носа, жесткости конечностей и печени и контрактур мускулатуры. После завершения перфузии лист стволовых клеток помещали на роговицу крысы с помощью мягкого манипулятора. Другой глаз крысы использовали в качестве контроля. Затем проводили энуклеацию с помощью микроножниц.
Другой глаз крысы использовали в качестве контроля. Затем проводили энуклеацию с помощью микроножниц.Иммуногистохимия и визуализация листа стволовых клеток, трансплантированных на роговицу.
Энуклеация сопровождалась помещением глазного яблока на сухой лед, а затем в форму. Впоследствии форма была заполнена компаундом-заливочной средой с оптимальной температурой резания (OCT) для обеспечения OCT. Криосеки на срезы размером 40 мкм проводили с помощью криостата. Затем срезы фиксировали с использованием 4% PFA, поскольку фиксировали глазное яблоко, но не лист стволовых клеток.Образец промывали трижды трис-буферным физиологическим раствором (TBS) в течение 5 мин. Срез окрашивали гематоксилином и эозином с последующей дегидратацией в цитразоле в течение 5 мин. Окрашенный срез ткани визуализировали с помощью Axio Zoom.V16.
Изготовление EP-сенсора и оценка его функции после размещения на сердце ex vivo с помощью мягкого манипулятора
Изготовление EP-сенсора началось с нанесения покрытия центрифугированием на слой полиметилметакрилата (PMMA; ~ 1 мкм) толщиной) на стеклянной подложке с последующим термическим отжигом при 180 ° C в течение 1 мин. Последующий слой полиимида (толщиной ~ 1 мкм) был нанесен и отвержден в вакуумной печи при 250 ° C в течение 1 часа. Тонкие пленки Cr и Au ( t = 5 нм / 150 нм толщиной) осаждались методом электронно-лучевого испарения. Фотолитографическое нанесение рисунка с использованием фоторезиста негативного типа (Riston MM540, DuPont) с последующим влажным травлением с помощью травителей Au и Cr (Transene) определило элемент джоулевого нагрева. Полученную структуру погрузили в ацетон для растворения нижнего слоя ПММА. Анизотропная проводящая пленка (ACF; HST-9805-210, Elform) была прикреплена к клеммам и подключена к внешней системе сбора данных.Измерение сигналов ЭКГ начиналось с прикрепления двух имеющихся в продаже проводящих электродов (30 мм на 24 мм, h224SG, Kendall) по диагонали через сердце свиньи. Затем электроды были подключены к генератору сигналов произвольной формы (3390, Keithley) для подачи заранее запрограммированной формы сердечного сигнала (частота 1 Гц, амплитуда 50 мВ).
Последующий слой полиимида (толщиной ~ 1 мкм) был нанесен и отвержден в вакуумной печи при 250 ° C в течение 1 часа. Тонкие пленки Cr и Au ( t = 5 нм / 150 нм толщиной) осаждались методом электронно-лучевого испарения. Фотолитографическое нанесение рисунка с использованием фоторезиста негативного типа (Riston MM540, DuPont) с последующим влажным травлением с помощью травителей Au и Cr (Transene) определило элемент джоулевого нагрева. Полученную структуру погрузили в ацетон для растворения нижнего слоя ПММА. Анизотропная проводящая пленка (ACF; HST-9805-210, Elform) была прикреплена к клеммам и подключена к внешней системе сбора данных.Измерение сигналов ЭКГ начиналось с прикрепления двух имеющихся в продаже проводящих электродов (30 мм на 24 мм, h224SG, Kendall) по диагонали через сердце свиньи. Затем электроды были подключены к генератору сигналов произвольной формы (3390, Keithley) для подачи заранее запрограммированной формы сердечного сигнала (частота 1 Гц, амплитуда 50 мВ). Датчик EP переносили на поверхность сердца свиньи с помощью мягкого манипулятора. Датчик был подключен к внешнему предусилителю (Octal Bio Amp, ADInstruments) и блоку сбора данных (PowerLab 16/35, ADInstruments), где захваченный сигнал ЭКГ подвергался цифровой фильтрации с полосовым фильтром с полосой пропускания 0.От 5 до 100 Гц.
Датчик EP переносили на поверхность сердца свиньи с помощью мягкого манипулятора. Датчик был подключен к внешнему предусилителю (Octal Bio Amp, ADInstruments) и блоку сбора данных (PowerLab 16/35, ADInstruments), где захваченный сигнал ЭКГ подвергался цифровой фильтрации с полосовым фильтром с полосой пропускания 0.От 5 до 100 Гц.
Произошла ошибка при настройке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.

Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie
потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Чтобы предоставить доступ без файлов cookie
потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
Магнитная манипуляция аксональным транспортом эндосом в живых нейронах
Резюме
Неинвазивный контроль аксональных грузов в живых нейронах — сложная перспектива, которая может сделать возможным новые исследования механизмов аксонального транспорта груза, передачи сигналов, опосредованной грузом, и пробок аксонов в нейронах . Однако традиционные методы манипулирования силой, такие как оптические ловушки, ограничены грузами размером в несколько микрон и неприменимы к небольшим грузам аксонов в живых нейронах.Здесь мы представляем новую методологию, которая позволяет осуществлять внешний контроль аксонального транспорта эндосом с помощью специальных магнитных сил. Посредством культивирования нейронов в микрофлюидном устройстве, состоящем из микропроцессорных магнитных массивов, мы можем воздействовать на ретроградные аксональные эндосомы, несущие флуоресцентные магнитные наночастицы размером 100-260 нм, силы 3–48 пН. Магнитная сила противодействует силам, создаваемым молекулярными двигателями, приводящими в движение эндосомы, и приводит к широкому спектру нарушений транспорта эндосом в аксонах.Эти возмущения, зафиксированные с помощью флуоресцентной визуализации при наклонном освещении, открывают новые взгляды на коллективную функцию динеинов и природу приостановленных и стационарных состояний во время ретроградного транспорта эндосом в аксонах.
Однако традиционные методы манипулирования силой, такие как оптические ловушки, ограничены грузами размером в несколько микрон и неприменимы к небольшим грузам аксонов в живых нейронах.Здесь мы представляем новую методологию, которая позволяет осуществлять внешний контроль аксонального транспорта эндосом с помощью специальных магнитных сил. Посредством культивирования нейронов в микрофлюидном устройстве, состоящем из микропроцессорных магнитных массивов, мы можем воздействовать на ретроградные аксональные эндосомы, несущие флуоресцентные магнитные наночастицы размером 100-260 нм, силы 3–48 пН. Магнитная сила противодействует силам, создаваемым молекулярными двигателями, приводящими в движение эндосомы, и приводит к широкому спектру нарушений транспорта эндосом в аксонах.Эти возмущения, зафиксированные с помощью флуоресцентной визуализации при наклонном освещении, открывают новые взгляды на коллективную функцию динеинов и природу приостановленных и стационарных состояний во время ретроградного транспорта эндосом в аксонах. В частности, мы демонстрируем контролируемый захват и высвобождение ретроградных эндосом в аксонах путем переключения внешнего магнитного поля. Этот технический прогресс имеет большой потенциал для выяснения пространственно-временного происхождения путей передачи сигналов эндосом на большие расстояния, а также разветвлений аксональных пробок в нейронах.
В частности, мы демонстрируем контролируемый захват и высвобождение ретроградных эндосом в аксонах путем переключения внешнего магнитного поля. Этот технический прогресс имеет большой потенциал для выяснения пространственно-временного происхождения путей передачи сигналов эндосом на большие расстояния, а также разветвлений аксональных пробок в нейронах.
Введение
Аксон действует как канал для транспортировки грузов на большие расстояния между телом клетки и окончаниями аксона в нейронах 1,2 . Аксональные микротрубочки служат поляризованными треками для молекулярных моторных белков, кинезинов и динеинов, транспортируя в противоположных направлениях и неся разнообразные грузы по всему аксону 3,4 . Многочисленные грузы, включая цитоскелетные структуры, белки, синаптические пузырьки, эндосомы и т. Д., Переносятся кинезинами антероградно от тела клетки к окончанию аксона.Быстрый антероградный транспорт важен для роста аксонов, синаптической сборки и пластичности нейронов. С другой стороны, различные грузы, включая везикулы, сигнальные эндосомы, лизосомы, аутофагосомы и т. Д., Ретроградно транспортируются от окончаний аксонов к телу клетки с помощью динеинов. Быстрый ретроградный транспорт опосредует многие механизмы передачи сигналов, очистки и деградации в нейронах 5,6 . Следовательно, транспорт аксонов на большие расстояния является фундаментальным для структуры, функции и выживания нейронов.В самом деле, нарушение аксонального транспорта, вызванное дефектами двигательной функции или неблагоприятными условиями, такими как пробки, вовлечено во многие нейродегенеративные заболевания 5,7-17 .
С другой стороны, различные грузы, включая везикулы, сигнальные эндосомы, лизосомы, аутофагосомы и т. Д., Ретроградно транспортируются от окончаний аксонов к телу клетки с помощью динеинов. Быстрый ретроградный транспорт опосредует многие механизмы передачи сигналов, очистки и деградации в нейронах 5,6 . Следовательно, транспорт аксонов на большие расстояния является фундаментальным для структуры, функции и выживания нейронов.В самом деле, нарушение аксонального транспорта, вызванное дефектами двигательной функции или неблагоприятными условиями, такими как пробки, вовлечено во многие нейродегенеративные заболевания 5,7-17 .
Взаимодействие между аксональной транспортировкой грузов на большие расстояния, сигнальными механизмами, связанными с грузом, и функцией нейронов до сих пор было предметом обширных исследований 6 . Тем не менее, существует множество вопросов о биофизических механизмах автомобильного транспорта в аксонах, пространственно-временном происхождении сигнальных грузов и разветвлениях аксональных транспортных пробок для нейродегенерации. Множество таких вопросов потенциально может быть решено путем разработки новых технологий, которые позволяют неинвазивно манипулировать аксональными грузами внешними силами. Во-первых, анализ аксонального транспорта груза при контролируемых внешних силах может пролить свет на транспортные механизмы и совместную механику двигателей, управляющих этим транспортом на большие расстояния. Во-вторых, внешний контроль над грузами аксонов, подобными сигнальным эндосомам, которые обеспечивают ретроградные сигнальные пути, может раскрыть пространственно-временную природу передачи сигналов эндосом в разных нейрональных компартментах.В-третьих, неинвазивный контроль силы аксональных грузов может привести к новым инновационным методам проектирования аксональных пробок для систематического анализа связей между дорожными пробками и нейродегенерацией.
Множество таких вопросов потенциально может быть решено путем разработки новых технологий, которые позволяют неинвазивно манипулировать аксональными грузами внешними силами. Во-первых, анализ аксонального транспорта груза при контролируемых внешних силах может пролить свет на транспортные механизмы и совместную механику двигателей, управляющих этим транспортом на большие расстояния. Во-вторых, внешний контроль над грузами аксонов, подобными сигнальным эндосомам, которые обеспечивают ретроградные сигнальные пути, может раскрыть пространственно-временную природу передачи сигналов эндосом в разных нейрональных компартментах.В-третьих, неинвазивный контроль силы аксональных грузов может привести к новым инновационным методам проектирования аксональных пробок для систематического анализа связей между дорожными пробками и нейродегенерацией.
Однако неинвазивный контроль внешней силы аксональных грузов в живых нейронах является технической проблемой. Использование оптической силы в клетках ограничено несколькими крупными клеточными грузами, такими как липидные капли и фагосомы латексных шариков, которыми можно манипулировать с помощью оптического пинцета 18-21 . Небольшие грузы аксонов в аксонах узкого калибра (0,5–1 мкм) не поддаются оптическому захвату, который также довольно инвазивен для живых нейронов. Точно так же подходы с магнитным захватом 22,23 , которые используют неинвазивные магнитные силы для управления магнитными шариками микронного размера, не использовались для манипулирования транспортировкой груза в клетках и не могут быть применимы для манипуляции с аксональным грузом. Сообщалось о применении микротехнических магнитных пинцетов для контроля диффузного накопления микрочастиц магнитных наночастиц в клетках 24,25 .Однако нет сообщений о методе нацеливания магнитных наночастиц на клеточные грузы. Кроме того, ни один из этих подходов не применялся для контроля направленного движения грузов, управляемого молекулярными двигателями в клетках. Steketee и его коллеги сообщили о новом подходе с использованием острого магнитного наконечника для манипулирования транспортом эндосом в нейронах 26,27 . Однако подход на основе одного наконечника имеет низкую пропускную способность (по одному нейрону за раз) и не имеет селективности ретроградных эндосом по сравнению с антероградными, что ограничивает его биологические применения.
Небольшие грузы аксонов в аксонах узкого калибра (0,5–1 мкм) не поддаются оптическому захвату, который также довольно инвазивен для живых нейронов. Точно так же подходы с магнитным захватом 22,23 , которые используют неинвазивные магнитные силы для управления магнитными шариками микронного размера, не использовались для манипулирования транспортировкой груза в клетках и не могут быть применимы для манипуляции с аксональным грузом. Сообщалось о применении микротехнических магнитных пинцетов для контроля диффузного накопления микрочастиц магнитных наночастиц в клетках 24,25 .Однако нет сообщений о методе нацеливания магнитных наночастиц на клеточные грузы. Кроме того, ни один из этих подходов не применялся для контроля направленного движения грузов, управляемого молекулярными двигателями в клетках. Steketee и его коллеги сообщили о новом подходе с использованием острого магнитного наконечника для манипулирования транспортом эндосом в нейронах 26,27 . Однако подход на основе одного наконечника имеет низкую пропускную способность (по одному нейрону за раз) и не имеет селективности ретроградных эндосом по сравнению с антероградными, что ограничивает его биологические применения. Необходимы новые инновационные подходы для манипуляции внешней силой аксонов в живых нейронах.
Необходимы новые инновационные подходы для манипуляции внешней силой аксонов в живых нейронах.
В этой работе мы представляем новую методологию, основанную на культуре микрожидкостных нейронов внутри микропроцессорных магнитных массивов. В частности, мы демонстрируем использование магнитных сил для управления ретроградным транспортом аксональных эндосом в живых нейронах. Путем выборочного нацеливания магнитных наночастиц (МНЧ) на ретроградные аксональные эндосомы мы могли бы оказывать магнитные силы в диапазоне 3-48 пН, которые приводят к широкому спектру возмущений на МНЧ-эндосомы в аксонах.Помимо предоставления нового понимания механики ретроградного транспорта эндосом в аксонах, наши результаты доказывают, что неинвазивные внешние силы могут быть спроектированы для управления аксональными грузами. Наша методология, которая может быть дополнительно оптимизирована путем настройки конструкции устройства и MNP, открывает большие возможности для проведения новых исследований механизмов аксонального транспорта груза, передачи сигналов, опосредованной грузом, и пробок аксонов в нейронах.
Результаты
Магнитные манипуляции с аксональными эндосомами
Наш подход состоит в том, чтобы вызвать рецептор-опосредованный эндоцитоз флуоресцентных магнитных наночастиц (МНЧ) на окончаниях аксонов, а затем применить сильно локализованные внешние магнитные силы для манипулирования эндосомами, содержащими МНЧ, в средние сегменты аксонов (рис.1А). Основной принцип заключается в том, что на MNP в градиенте магнитного поля действует сила, пропорциональная градиенту поля и магнитному моменту частицы 22,23 . Чтобы противодействовать кумулятивной силе динеинов, управляющих ретроградными MNP-эндосомами, магнитная сила должна находиться в диапазоне 5-20 пН. Узкий калибр аксонов (<1 мкм) и небольшой размер аксональных эндосом (<300 нм) 28,29 ограничивают диаметр МНЧ до <250 нм для эффективного эндоцитоза и ретроградного аксонального транспорта МНЧ.Градиент магнитного поля, необходимый для воздействия 5-20 пН на такие маленькие MNP, составляет ∼10 5 Т / м на основе предыдущих измерений 30 . Такие высокие градиенты могут быть достигнуты путем размещения магнитных микроструктур в непосредственной близости (<10 мкм) к аксону, содержащему MNP-эндосомы. Кроме того, с помощью магнитомягких микроструктур, которые могут быть намагничены внешним магнитным полем, магнитные силы на эндосомах MNP могут быть включены / выключены по мере необходимости. Влияние магнитных сил на транспорт MNP-эндосомы можно визуализировать в реальном времени с помощью флуоресцентной визуализации с наклонным освещением, которую мы ранее продемонстрировали 31-33 .
Такие высокие градиенты могут быть достигнуты путем размещения магнитных микроструктур в непосредственной близости (<10 мкм) к аксону, содержащему MNP-эндосомы. Кроме того, с помощью магнитомягких микроструктур, которые могут быть намагничены внешним магнитным полем, магнитные силы на эндосомах MNP могут быть включены / выключены по мере необходимости. Влияние магнитных сил на транспорт MNP-эндосомы можно визуализировать в реальном времени с помощью флуоресцентной визуализации с наклонным освещением, которую мы ранее продемонстрировали 31-33 .
Магнитная манипуляция ретроградного аксонального транспорта A) Схематическая иллюстрация MNP, покрытых агглютинином зародышей пшеницы (WGA), интернализованных на терминалях аксона и ретроградно транспортируемых по аксону с помощью микротрубчатого моторного транспорта. Б) Схема нашего магнитно-микрофлюидного устройства, разделяющего тела клеток и терминалы аксонов в две разные камеры, соединенные только каналами между прямоугольными микромагнитами. C) Схема геометрии магнитного узора и приложения внешнего магнитного поля для намагничивания микромагнетиков.
C) Схема геометрии магнитного узора и приложения внешнего магнитного поля для намагничивания микромагнетиков.
Таким образом, ключевыми соображениями дизайна в нашей методологии являются: A) функционализация поверхности флуоресцентных MNP для рецептор-опосредованного эндоцитоза в нейронах и визуализации, B) микрофлюидная изоляция тел клеток и окончаний аксонов, чтобы MNP можно было выборочно наносить на окончания аксонов. , C) мягкие микромагниты, которые можно включать / выключать, размещать в непосредственной близости от аксонов, несущих ретроградные MNP-эндосомы, и D) совместимость с флюоресцентной визуализацией для отслеживания влияния магнитных сил на транспорт аксональных MNP-эндосом в реальном времени.Мы достигли всех этих требований, изготовив массивы мягких микромагнитов на покровных стеклах и направив рост аксонов через малое расстояние (5-10 мкм) между микромагнитами, как описано ниже.
Дизайн и изготовление магнитно-микрофлюидного устройства для культуры нейронов
На рис. 1B-C показан дизайн нашего прототипа магнитно-микрофлюидного устройства, совместимого с микрожидкостными культурами нейронов, высокоградиентными магнитными манипуляциями и флюоресцентной визуализацией. Микрожидкостно-магнитное устройство состоит из массивов прямоугольных микромагнитов, изготовленных методом электроосаждения пермаллоя (80:20 Ni: Fe) на покровные стекла.Мы выбрали пермаллой из-за его превосходных магнитомягких свойств. Прямоугольные микромагниты, пассивированные слоем SiO 2 толщиной 100 нм, расположены близко друг к другу для создания микрофлюидных каналов длиной 200 мкм, шириной 5-10 мкм и глубиной 3 мкм на поверхности стекла. Для достижения высокой производительности на одной подложке изготавливаются сотни магнитных микроструктур. Чип из полидиметилсилоксана (PDMS) с двумя отверстиями, пробитыми биопсией, образует водонепроницаемое уплотнение на поверхности микромагнита, создавая, таким образом, микрофлюидно-магнитное устройство с двумя камерами, соединенными микрожидкостными каналами между микромагнитами.
1B-C показан дизайн нашего прототипа магнитно-микрофлюидного устройства, совместимого с микрожидкостными культурами нейронов, высокоградиентными магнитными манипуляциями и флюоресцентной визуализацией. Микрожидкостно-магнитное устройство состоит из массивов прямоугольных микромагнитов, изготовленных методом электроосаждения пермаллоя (80:20 Ni: Fe) на покровные стекла.Мы выбрали пермаллой из-за его превосходных магнитомягких свойств. Прямоугольные микромагниты, пассивированные слоем SiO 2 толщиной 100 нм, расположены близко друг к другу для создания микрофлюидных каналов длиной 200 мкм, шириной 5-10 мкм и глубиной 3 мкм на поверхности стекла. Для достижения высокой производительности на одной подложке изготавливаются сотни магнитных микроструктур. Чип из полидиметилсилоксана (PDMS) с двумя отверстиями, пробитыми биопсией, образует водонепроницаемое уплотнение на поверхности микромагнита, создавая, таким образом, микрофлюидно-магнитное устройство с двумя камерами, соединенными микрожидкостными каналами между микромагнитами. Нейроны, помещенные в камеру тела клетки, распространяют свои аксоны через микрофлюидные каналы в дистальную камеру аксонов, что обеспечивает непосредственную близость аксонов к микромагнитам. MNP, инкубированные в дистальной камере аксона, интернализуются, образуя MNP-эндосомы, которые ретроградно транспортируются по аксонам между микромагнитами. Применяя внешнее магнитное поле с помощью двух постоянных магнитов NdFeB, расположенных по обе стороны от устройства, мы можем намагничивать мягкие микромагниты и индуцировать магнитные силы, которые действуют внутрь в микрофлюидные каналы (см. Ниже).Влияние магнитных сил на MNP-эндосомы внутри каналов визуализируется в режиме реального времени с помощью флуоресцентной визуализации с наклонным освещением через прозрачные микрофлюидные каналы.
Нейроны, помещенные в камеру тела клетки, распространяют свои аксоны через микрофлюидные каналы в дистальную камеру аксонов, что обеспечивает непосредственную близость аксонов к микромагнитам. MNP, инкубированные в дистальной камере аксона, интернализуются, образуя MNP-эндосомы, которые ретроградно транспортируются по аксонам между микромагнитами. Применяя внешнее магнитное поле с помощью двух постоянных магнитов NdFeB, расположенных по обе стороны от устройства, мы можем намагничивать мягкие микромагниты и индуцировать магнитные силы, которые действуют внутрь в микрофлюидные каналы (см. Ниже).Влияние магнитных сил на MNP-эндосомы внутри каналов визуализируется в режиме реального времени с помощью флуоресцентной визуализации с наклонным освещением через прозрачные микрофлюидные каналы.
Процесс изготовления микрофлюидно-магнитного устройства поэтапно проиллюстрирован на рис. 2A. (1) Процесс начинается с чистого стандартного покровного стекла микроскопа (24 мм x 40 мм, 120 мкм толщиной). (2) На покровное стекло напыляют проводящий затравочный слой Cr / Au 10 нм / 50 нм. (3) Слой фоторезиста толщиной 7 мкм наносится методом центрифугирования на слой Au.(4) Затем слой фоторезиста формируется посредством УФ-экспонирования в выравнивателе контактной маски, чтобы обнажить слой Au в желаемых областях. (5) Гальваническое нанесение пермаллоя (Ni: Fe 80:20, толщина 3 мкм) на обнаженный слой Au проводят в соответствии с опубликованным протоколом 34 . (6) Слой фоторезиста удаляется промывкой в ацетоне. (7) Слой Cr / Au удаляется сухим травлением, что делает покровное стекло прозрачным там, где магнитный материал не покрыт. (8) Затем поверхность магнита пассивируется тонким слоем 50 нм / 50 нм Si 3 N 4 / SiO 2 .(9) SMD формируется путем герметизации поверхности микромагнита микросхемой PDMS.
(2) На покровное стекло напыляют проводящий затравочный слой Cr / Au 10 нм / 50 нм. (3) Слой фоторезиста толщиной 7 мкм наносится методом центрифугирования на слой Au.(4) Затем слой фоторезиста формируется посредством УФ-экспонирования в выравнивателе контактной маски, чтобы обнажить слой Au в желаемых областях. (5) Гальваническое нанесение пермаллоя (Ni: Fe 80:20, толщина 3 мкм) на обнаженный слой Au проводят в соответствии с опубликованным протоколом 34 . (6) Слой фоторезиста удаляется промывкой в ацетоне. (7) Слой Cr / Au удаляется сухим травлением, что делает покровное стекло прозрачным там, где магнитный материал не покрыт. (8) Затем поверхность магнита пассивируется тонким слоем 50 нм / 50 нм Si 3 N 4 / SiO 2 .(9) SMD формируется путем герметизации поверхности микромагнита микросхемой PDMS.
Изготовление и характеристика магнитно-микрофлюидного устройства. А) Порядок изготовления микромагнитов. Б) Светлое поле и В) СЭМ-изображения картины микромагнита. D) Петля гистерезиса B-H магнитно-микрофлюидного устройства показывает очень небольшую остаточную намагниченность.
D) Петля гистерезиса B-H магнитно-микрофлюидного устройства показывает очень небольшую остаточную намагниченность.
Фиг. 2B, C показаны изображения микромагнитной картины в светлом поле и сканирующей электронной микроскопии (SEM) соответственно.Прямоугольные микромагниты расположены попеременно на расстоянии 5 мкм и 10 мкм. Отметим, что внешнее магнитное поле NdFeB прикладывается по ширине прямоугольных микромагнитов для их намагничивания и индукции полюсов по их ширине. Анизотропия формы прямоугольных микромагнитов обеспечивает почти полное размагничивание микромагнетиков при удалении поля NdFeB. На рис. 2D показана петля гистерезиса микрофлюидно-магнитного устройства, измеренная с помощью измерителя петли B-H (Shb Instruments, Inc.). Это подтверждает магнитомягкое поведение пленки пермаллоя со значением Bs 1 Тл при приложенном поле 350 А / м, низкой остаточной магнитной индукции 0,11 Тл и коэрцитивной силе 25 А / м. Низкая остаточная намагниченность показывает, что мы можем включать и выключать эти микромагниты, используя внешнее магнитное поле NdFeB.
Направленность магнитной силы и оценка силы в SMD
Чтобы проанализировать магнитные силы в нашем SMD (мягкомагнитно-микрофлюидном устройстве), мы сначала смоделировали градиенты магнитного поля в каналах между микромагнитами, используя аналитическую трехмерную модель 35,36 .Градиенты магнитного поля до 10 5 Т / м рассчитываются в пределах 1 мкм от краев микромагнита (рис. S1, поддерживающий материал). Используя модель намагничивания линейного насыщения 35 , мы затем оценили магнитные силы в диапазоне 5-50 пН на МНЧ из оксида железа 100 нм в нашем микрофлюидно-магнитном устройстве (рис. S2). Примечательной особенностью магнитного рисунка является направленность магнитной силы внутри и снаружи каналов, как показано результатами моделирования на рис.3А. Магнитная сила внутри канала в основном действует перпендикулярно каналу (т. Е. Направлению аксонального транспорта). Однако на выходе из канала сила направлена внутрь по каналу (т. Е. Параллельно направлению транспортировки). Таким образом, MNP-эндосомы, транспортирующиеся из каналов, будут сталкиваться с противодействующей магнитной силой, действующей как преграда. Эта направленность магнитных сил также подтверждается экспериментальным отслеживанием MNP под действием силы в смесях глицерина и воды 10: 1 на наших SMD (Movie S1).На рис. 3B показана временная проекция фильма, изображающего следы MNP, тянущихся к микромагнитам при включении сил.
Е. Параллельно направлению транспортировки). Таким образом, MNP-эндосомы, транспортирующиеся из каналов, будут сталкиваться с противодействующей магнитной силой, действующей как преграда. Эта направленность магнитных сил также подтверждается экспериментальным отслеживанием MNP под действием силы в смесях глицерина и воды 10: 1 на наших SMD (Movie S1).На рис. 3B показана временная проекция фильма, изображающего следы MNP, тянущихся к микромагнитам при включении сил.
Оценка магнитной силы в магнитно-микрофлюидном устройстве A) Направленность структуры магнитной силы в канале между двумя микромагнитами. Цветовой профиль выделяет области высокой силы (красный) и низкой силы (зеленый). Б) Траектории флуоресцентных МНЧ, притягиваемых к микромагнитным краям (красные пунктирные линии) под действием силы.Масштабная линейка = 5 мкм. C) F x на расстоянии 2,5 мкм от края магнита внутри канала в зависимости от диаметра частицы. Отдельные точки данных для каждой траектории MNP (серые маркеры) и разбитой статистики (Среднее ± 3 * SEM в красном). D) F Y на расстоянии ∼3 мкм от отверстия канала в зависимости от диаметра частицы. Статистические данные по бинну не рассчитывались из-за ограниченного количества данных выше 200 нм.
D) F Y на расстоянии ∼3 мкм от отверстия канала в зависимости от диаметра частицы. Статистические данные по бинну не рассчитывались из-за ограниченного количества данных выше 200 нм.
Мы также экспериментально оценили магнитные силы на MNP внутри и вне каналов от траекторий MNP под действием силы в смесях глицерина и воды 10: 1 (поддерживающий материал).Прежде всего, мы наблюдали четкое отображение между размером MNP (диаметр SEM, D ) и интенсивностью флуоресценции MNP ( I α D 2 ), как показано перекрывающимися распределениями D и . √I на рис. S3. Это позволило нам оценить размер MNP по интенсивности его флуоресценции ( D = A * √I + B ) путем сопоставления кумулятивных функций распределения (рис. S3). Используя размер МНЧ D и скорость МНЧ v , извлеченную из индивидуальных траекторий МНЧ под действием силы, вязкость η , мы оценили силу ( F = 3πηvD ) на МНЧ внутри и вне каналов на разных расстояниях от микромагниты (рис. S4). На рис. 3C показана магнитная сила, действующая на MNP различных размеров на расстоянии 2,5 мкм от края микромагнита внутри канала. На рис. 3D показана магнитная сила, действующая внутрь канала на расстоянии ~ 3 мкм от выходов канала. Почти кубическое масштабирование магнитной силы с размером MNP дополнительно подтверждает соответствие между интенсивностью флуоресценции MNP и размером MNP (рис. 3C, D). В дальнейшем мы использовали эти кривые кубического масштабирования для оценки силы, действующей на MNP в нашем микрофлюидно-магнитном устройстве, с учетом измеренной интенсивности флуоресценции MNP.
S4). На рис. 3C показана магнитная сила, действующая на MNP различных размеров на расстоянии 2,5 мкм от края микромагнита внутри канала. На рис. 3D показана магнитная сила, действующая внутрь канала на расстоянии ~ 3 мкм от выходов канала. Почти кубическое масштабирование магнитной силы с размером MNP дополнительно подтверждает соответствие между интенсивностью флуоресценции MNP и размером MNP (рис. 3C, D). В дальнейшем мы использовали эти кривые кубического масштабирования для оценки силы, действующей на MNP в нашем микрофлюидно-магнитном устройстве, с учетом измеренной интенсивности флуоресценции MNP.
Мы проверили совместимость микрофлюидно-магнитных устройств для долгосрочного культивирования нейронов, используя протокол культивирования нейронов DRG в микрофлюидных устройствах из наших более ранних исследований 31,32 . Вкратце, SMD покрыт поли-L-лизином для облегчения прикрепления и выживания клеток. Нейроны DRG от эмбриональных крыс E18 диссоциируют и помещают в камеру тела клетки. В течение 3-5 дней нейроны легко протянули аксоны через два массива микромагнитов в дистальную камеру аксона.Нейроны DRG, культивируемые в микрофлюидно-магнитных устройствах, выжили> 3 недель, что сопоставимо с выживаемостью нейронов на покровных стеклах, покрытых поли-L-лизином, в наших более ранних исследованиях. Фиг. 4A показывает изображение в светлом поле культуры DRG 12 дней в микрофлюидно-магнитном устройстве. Тень в камере корпуса элемента (левая часть изображения) обусловлена неровным краем вырезанного вручную чипа PDMS. Крошечные черные точки в дистальной камере аксона — это покрытые лектином МНЧ (см. Ниже), применяемые для визуализации ретроградного транспорта МНЧ-эндосомы.Рисунок микромагнита довольно прочен, и микрожидкостное магнитное устройство можно повторно использовать для многократных циклов культивирования, визуализации и очистки.
Нейроны DRG от эмбриональных крыс E18 диссоциируют и помещают в камеру тела клетки. В течение 3-5 дней нейроны легко протянули аксоны через два массива микромагнитов в дистальную камеру аксона.Нейроны DRG, культивируемые в микрофлюидно-магнитных устройствах, выжили> 3 недель, что сопоставимо с выживаемостью нейронов на покровных стеклах, покрытых поли-L-лизином, в наших более ранних исследованиях. Фиг. 4A показывает изображение в светлом поле культуры DRG 12 дней в микрофлюидно-магнитном устройстве. Тень в камере корпуса элемента (левая часть изображения) обусловлена неровным краем вырезанного вручную чипа PDMS. Крошечные черные точки в дистальной камере аксона — это покрытые лектином МНЧ (см. Ниже), применяемые для визуализации ретроградного транспорта МНЧ-эндосомы.Рисунок микромагнита довольно прочен, и микрожидкостное магнитное устройство можно повторно использовать для многократных циклов культивирования, визуализации и очистки.
Ретроградный аксональный транспорт MNP-эндосом в магнитно-микрофлюидном устройстве A) Культура нейронов DRG в магнитно-микрофлюидном устройстве через 12 дней in vitro показывает, что многие аксоны пересекают магнитные каналы в дистальный отдел аксонов. Б) Снимок фильма, показывающий, как MNP-эндосомы транспортируются в аксонах (вверху), и временная проекция фильма, показывающая треки MNP-эндосом вдоль аксонов (внизу).Масштабная линейка = 10 мкм. В) Средняя скорость ретроградного транспорта MNP-эндосом в аксонах. D) Распределение интенсивности флуоресценции поверхностно связанных MNP (синий) и MNP-эндосом, транспортируемых в аксонах (зеленый). Соответствующий диаметр MNP, показанный на верхней оси, получен из сопоставления D = A * √I + B .
Б) Снимок фильма, показывающий, как MNP-эндосомы транспортируются в аксонах (вверху), и временная проекция фильма, показывающая треки MNP-эндосом вдоль аксонов (внизу).Масштабная линейка = 10 мкм. В) Средняя скорость ретроградного транспорта MNP-эндосом в аксонах. D) Распределение интенсивности флуоресценции поверхностно связанных MNP (синий) и MNP-эндосом, транспортируемых в аксонах (зеленый). Соответствующий диаметр MNP, показанный на верхней оси, получен из сопоставления D = A * √I + B .
Затем мы изучили ретроградный транспорт флуоресцентных МНЧ, покрытых агглютинином зародышей пшеницы (WGA) (100 — 350 нм, распределение размеров на сканирующем электронном микроскопе на рис. S3), в аксоны, используя визуализацию наклонного освещения с минимальной мощностью лазера (∼0.14 Вт / см 2 ). WGA представляет собой установленный ретроградный индикатор 37,38 , который, как показано, способствует рецептор-опосредованному эндоцитозу и транспорту наночастиц в клетках 39 , включая нейроны 31 . Мы наблюдали устойчивый ретроградный транспорт WGA-MNPs в аксонах внутри микроканалов после 2,5 ч инкубации в дистальной аксонной камере SMD (Movie S2). Рис. 4B показывает снимок MNP-эндосом в аксонах и проекцию покадровой видеозаписи MNP-эндосом, движущихся из микромагнитного канала в камеру тела клетки (магнитная сила отключена).Рис. 4C показывает распределение скорости ретроградных MNP-эндосом в аксонах со средней скоростью движения 0,94 ± 0,55 мкм / с, что согласуется с ранее опубликованной работой по исследованиям аксонального транспорта 31,32 . На рис. 4D показано распределение интенсивности флуоресценции ретроградных MNP-эндосом, транспортируемых в аксонах, наложенное на таковое из инкубированных MNP. На основании сопоставления между интенсивностью флуоресценции и размером MNP, имеется надежная интернализация и ретроградный транспорт MNP размером <150 нм (заштрихованная область на рис. 4D).Мы также видим ретроградный транспорт MNPs вплоть до диапазона размеров 260 нм, хотя и с меньшей склонностью, чем у частиц меньшего размера.
Мы наблюдали устойчивый ретроградный транспорт WGA-MNPs в аксонах внутри микроканалов после 2,5 ч инкубации в дистальной аксонной камере SMD (Movie S2). Рис. 4B показывает снимок MNP-эндосом в аксонах и проекцию покадровой видеозаписи MNP-эндосом, движущихся из микромагнитного канала в камеру тела клетки (магнитная сила отключена).Рис. 4C показывает распределение скорости ретроградных MNP-эндосом в аксонах со средней скоростью движения 0,94 ± 0,55 мкм / с, что согласуется с ранее опубликованной работой по исследованиям аксонального транспорта 31,32 . На рис. 4D показано распределение интенсивности флуоресценции ретроградных MNP-эндосом, транспортируемых в аксонах, наложенное на таковое из инкубированных MNP. На основании сопоставления между интенсивностью флуоресценции и размером MNP, имеется надежная интернализация и ретроградный транспорт MNP размером <150 нм (заштрихованная область на рис. 4D).Мы также видим ретроградный транспорт MNPs вплоть до диапазона размеров 260 нм, хотя и с меньшей склонностью, чем у частиц меньшего размера.
Влияние магнитной силы на транспорт MNP-эндосом в аксонах
Когда внешние магниты NdFeB вводятся для намагничивания микрофлюидно-магнитного устройства, возникающие в результате силы приводят к широкому диапазону возмущений на эндосомах MNP, транспортируемых в аксонах. Диапазон размеров 100-260 нм МНЧ, транспортируемых эндосомами, приблизительно соответствует магнитным силам в диапазоне 3-48 пН для аксонов в пределах 2.5 мкм края микромагнитов (рис. 3C, D). В то время как транспорт малых МНЧ-эндосом (100 нм, ∼3 ± 1,7 пН) минимально нарушается магнитными силами, большие МНЧ-эндосомы (260 нм ∼ 48 ± 7,5 пН) останавливаются и захватываются на краях микромагнитов. . Захваченные эндосомы высвобождаются и возобновляют нормальный ретроградный транспорт, когда магнитная сила отключается путем удаления внешних магнитов NdFeB. Далее мы представляем эти результаты и полученные данные о механике ретроградного транспорта эндосом в аксонах.
Захват и высвобождение ретроградных MNP-эндосом в микроканалах
Рис. 5A представляет собой временную проекцию покадровой видеозаписи, показывающей ретроградную MNP-эндосому, транспортирующуюся по аксону с включенными магнитными силами. Мы оцениваем магнитную силу ∼46 ± 7,5 пН, действующую на эндосому MNP (исходя из размера MNP ∼255 нм, исходя из интенсивности), и расстояние от микромагнита (<2 мкм). Интересно, что стабильно движущаяся эндосома MNP демонстрировала некоторые возвратно-поступательные колебания перед тем, как быть вытянутой и захваченной краем магнита (рис.5B, фильм S3).
5A представляет собой временную проекцию покадровой видеозаписи, показывающей ретроградную MNP-эндосому, транспортирующуюся по аксону с включенными магнитными силами. Мы оцениваем магнитную силу ∼46 ± 7,5 пН, действующую на эндосому MNP (исходя из размера MNP ∼255 нм, исходя из интенсивности), и расстояние от микромагнита (<2 мкм). Интересно, что стабильно движущаяся эндосома MNP демонстрировала некоторые возвратно-поступательные колебания перед тем, как быть вытянутой и захваченной краем магнита (рис.5B, фильм S3).
Магнитная сила, перпендикулярная направлению транспорта MNP-эндосомы, достаточна, чтобы остановить транспорт крупных MNP. A) Временная проекция фильма, показывающего трек эндосомы MNP, притянутой к краю магнита под действием силы. Масштабная линейка = 10 мкм. B) Кимограф, изображающий траекторию MNP-эндосомы в A. Масштабные полосы = 2 мкм, 3 с. C) Траектория ретроградной MNP-эндосомы, многократно захватываемой и высвобождаемой путем включения и выключения магнитного поля. Y в зависимости от X (вверху слева, пунктирная линия представляет край микромагнита), Y в зависимости от времени (вверху справа) и X в зависимости от времени (внизу) траектории окрашены в красный цвет, когда магнитное поле включено.Координата X отсчитывается от края магнита. Заштрихованные области соответствуют включенному внешнему магнитному полю B (и, следовательно, магнитной силе).
Y в зависимости от X (вверху слева, пунктирная линия представляет край микромагнита), Y в зависимости от времени (вверху справа) и X в зависимости от времени (внизу) траектории окрашены в красный цвет, когда магнитное поле включено.Координата X отсчитывается от края магнита. Заштрихованные области соответствуют включенному внешнему магнитному полю B (и, следовательно, магнитной силе).
Во многих случаях при таком большом размере MNP магнитное возмущение довольно велико. На рис. 5C показана временная проекция фильма с ретроградной MNP-эндосомой (размер MNP ∼259 нм), перемещающейся по аксону, когда магнитная сила включается и выключается в течение трех циклов (Movie S4). При внезапном включении магнитных сил (участки траектории, окрашенные в красный цвет на рис.5C), MNP-эндосома притягивается близко к краю магнита, возможно, деформируя локальную форму аксона в канале или смещая аксон по направлению к магниту. Когда магнитная сила выключается, MNP-эндосома возвращается в исходное положение и возобновляет устойчивый однонаправленный ретроградный транспорт, указывая на то, что магнитная сила не влияет на мембрану эндосомы или локальную структуру микротрубочек. Насколько весь аксон мог перемещаться или деформироваться к краю магнита, мы не можем подтвердить, отделилась ли MNP-эндосома от микротрубочки в этом случае.Этот захват и высвобождение MNP-эндосомы между процессивными ретроградными прогонами может повторяться несколько раз (Movie S4). Эти результаты показывают, что с помощью MNP (~ 250 нм) в наших прототипах SMD, мы могли бы эффективно останавливать и высвобождать ретроградный трафик MNP-эндосом в сегменты аксонов внутри микроканалов.
Насколько весь аксон мог перемещаться или деформироваться к краю магнита, мы не можем подтвердить, отделилась ли MNP-эндосома от микротрубочки в этом случае.Этот захват и высвобождение MNP-эндосомы между процессивными ретроградными прогонами может повторяться несколько раз (Movie S4). Эти результаты показывают, что с помощью MNP (~ 250 нм) в наших прототипах SMD, мы могли бы эффективно останавливать и высвобождать ретроградный трафик MNP-эндосом в сегменты аксонов внутри микроканалов.
Подобные события захвата и высвобождения наблюдались даже для нескольких меньших MNP-эндосом (размер MNP ~ 150 нм), когда аксон находился в пределах 1,5 мкм от края микромагнита (Movie S5).Однако в целом транспорт MNP-эндосомы с размером MNP <150 нм (∼9 ± 2,4 пН) минимально нарушается в микроканалах. Удивительно, но мы также наблюдаем, как многие эндосомы с размером МНЧ ~ 200 нм транспортируются без остановки внутри микроканалов, несмотря на высокую оценочную силу ~ 22 ± 7,5 пН. Чтобы рационализировать это, важно отметить, что сила, действующая на MNP-эндосомы внутри микроканалов (особенно в аксонах> 2 мкм от края магнитов), ортогональна направлению транспорта эндосом. Вероятно, что эта ортогональная сила буферизуется за счет давления эндосомы на аксональный цитоскелет, прижимающего к эндосоме, в зависимости от близости между аксональной мембраной и MNP-эндосомой. Следовательно, реальная прогнозируемая нагрузка на MNP-эндосомы может быть меньше и ей противодействует совместная активность множественных динеинов. Когда ортогональная сила достаточно велика, чтобы притянуть связанную с микротрубочками MNP-эндосому к краю магнита (возможно, смещая аксон), возникает значительная составляющая силы, которая препятствует транспортировке, тем самым захватывая эндосому.Наши данные показывают, что это верно для MNP-размера ∼250 нм с расчетной силой ∼43 ± 7,5 пН.
Вероятно, что эта ортогональная сила буферизуется за счет давления эндосомы на аксональный цитоскелет, прижимающего к эндосоме, в зависимости от близости между аксональной мембраной и MNP-эндосомой. Следовательно, реальная прогнозируемая нагрузка на MNP-эндосомы может быть меньше и ей противодействует совместная активность множественных динеинов. Когда ортогональная сила достаточно велика, чтобы притянуть связанную с микротрубочками MNP-эндосому к краю магнита (возможно, смещая аксон), возникает значительная составляющая силы, которая препятствует транспортировке, тем самым захватывая эндосому.Наши данные показывают, что это верно для MNP-размера ∼250 нм с расчетной силой ∼43 ± 7,5 пН.
Противодействующая магнитная сила на выходах канала
Затем мы изучили эффект противодействующей магнитной силы на MNP-эндосомы путем мониторинга ретроградных MNP-эндосом, транспортирующихся из микроканалов в SMD (Movie S6). Мы наблюдали широкий спектр силовых возмущений на МНЧ-эндосомах на выходе из канала. Эндосомы с небольшими МНЧ (<150 нм), выведенными из каналов с минимальным возмущением (рис.6, зеленым цветом). Многие MNP-эндосомы постепенно выходят из каналов, но в целом проявляют склонность к паузам и кратковременным разворотам на выходе из каналов. Примечательно, что эндосомы с более крупными MNPs демонстрируют повторяющиеся срывы, отслоения и длинные отдачи под действием противоположной магнитной силы (Movie S6, Fig. 6 в красном). Некоторые из этих нарушенных MNP-эндосом постепенно вытягивались и оставались неподвижными внутри аксонов на выходах из каналов (Fig. 6). Различный эффект магнитных сил, наблюдаемый на различных MNP-эндосомах, в первую очередь связан с полидисперсным распределением MNP по размерам в этом исследовании, а также с выравниванием различных аксонов и их близостью к магнитам на выходах канала.Используя узкое распределение БОЛЬШИХ МНЧ (~ 250 нм), мы потенциально можем достичь однородного силового режима, который эффективно блокирует выход МНЧ-эндосом из каналов в SMD.
Эндосомы с небольшими МНЧ (<150 нм), выведенными из каналов с минимальным возмущением (рис.6, зеленым цветом). Многие MNP-эндосомы постепенно выходят из каналов, но в целом проявляют склонность к паузам и кратковременным разворотам на выходе из каналов. Примечательно, что эндосомы с более крупными MNPs демонстрируют повторяющиеся срывы, отслоения и длинные отдачи под действием противоположной магнитной силы (Movie S6, Fig. 6 в красном). Некоторые из этих нарушенных MNP-эндосом постепенно вытягивались и оставались неподвижными внутри аксонов на выходах из каналов (Fig. 6). Различный эффект магнитных сил, наблюдаемый на различных MNP-эндосомах, в первую очередь связан с полидисперсным распределением MNP по размерам в этом исследовании, а также с выравниванием различных аксонов и их близостью к магнитам на выходах канала.Используя узкое распределение БОЛЬШИХ МНЧ (~ 250 нм), мы потенциально можем достичь однородного силового режима, который эффективно блокирует выход МНЧ-эндосом из каналов в SMD.
Магнитная сила, противодействующая транспорту MNP-эндосомы на выходе из канала. A) Аксональные треки Y-X нескольких MNP-эндосом относительно положений микромагнита. Б) Траектории MNP-эндосом (Y в зависимости от времени), которые приблизительно соответствуют расстоянию, пройденному вдоль аксона с течением времени.В то время как эндосомы с более мелкими MNPs минимально возмущены (зеленый) и транспортируются из каналов, эндосомы с более крупными MNP демонстрируют повторяющиеся отслоения и останавливаются вокруг выхода канала (красный). Также см. Фильм S4. Магнитная сила включается в начале (в течение 1-3 секунд) фильма.
Перпендикулярная сила на приостановленных ретроградных эндосомах — паузы связаны с состояниями микротрубочек
Одной из примечательных черт аксонального транспорта эндосом является частая пауза между прохождениями по микротрубочкам.Более ранние сообщения показали, что ретроградные аксональные эндосомы приостанавливаются примерно на 30% времени во время ретроградного транспорта 6,32 . Здесь мы проанализировали влияние малых (2-6 пН) магнитных сил, перпендикулярных микротрубочке, на состояние паузы ретроградных MNP-эндосом в микроканалах. На рис. 7A показана траектория MNP-эндосомы, перемещающаяся на расстояние 2 мкм от края магнита. Транспорт MNP-эндосомы нарушен минимально, так как предполагаемая перпендикулярная сила равна 5.7 ± 1,8 пН на этом МНЧ (129 нм) недостаточно высоки. Интересно, что мы не наблюдали смещения МНЧ-эндосомы к магнитам во время пауз. Положение MNP-эндосомы во время пауз симметрично направлению транспорта (т.е. микротрубочки), как показано на фиг. 7B. Если бы приостановленные эндосомы не были связаны с микротрубочкой или были слабо закреплены, мы могли бы ожидать, что эндосомы дрейфуют к краю аксонов ближе к магнитам. Наш результат показывает, что приостановленные эндосомы прочно прикреплены к микротрубочке и не смещаются на 2-6 пН перпендикулярной силы.Это согласуется с нашим более ранним анализом движения, который дал эффективную константу диффузии ∼0.
Здесь мы проанализировали влияние малых (2-6 пН) магнитных сил, перпендикулярных микротрубочке, на состояние паузы ретроградных MNP-эндосом в микроканалах. На рис. 7A показана траектория MNP-эндосомы, перемещающаяся на расстояние 2 мкм от края магнита. Транспорт MNP-эндосомы нарушен минимально, так как предполагаемая перпендикулярная сила равна 5.7 ± 1,8 пН на этом МНЧ (129 нм) недостаточно высоки. Интересно, что мы не наблюдали смещения МНЧ-эндосомы к магнитам во время пауз. Положение MNP-эндосомы во время пауз симметрично направлению транспорта (т.е. микротрубочки), как показано на фиг. 7B. Если бы приостановленные эндосомы не были связаны с микротрубочкой или были слабо закреплены, мы могли бы ожидать, что эндосомы дрейфуют к краю аксонов ближе к магнитам. Наш результат показывает, что приостановленные эндосомы прочно прикреплены к микротрубочке и не смещаются на 2-6 пН перпендикулярной силы.Это согласуется с нашим более ранним анализом движения, который дал эффективную константу диффузии ∼0. 002 мкм 2 / с для приостановленных ретроградных эндосом в аксонах 32 . Другой общей чертой аксонального везикулярного транспорта в целом является то, что субпопуляция везикул неподвижна внутри аксонов. Хотя точный механизм и актуальность этих стационарных состояний неизвестны, мы видим, что незначительная часть ретроградных MNP-эндосом обнаруживает длинные стационарные состояния внутри аксонов.Основываясь на аналогичном анализе влияния перпендикулярных магнитных сил, мы обнаружили, что эти стационарные состояния ретроградных MNP-эндосом прочно закреплены внутри аксонов.
002 мкм 2 / с для приостановленных ретроградных эндосом в аксонах 32 . Другой общей чертой аксонального везикулярного транспорта в целом является то, что субпопуляция везикул неподвижна внутри аксонов. Хотя точный механизм и актуальность этих стационарных состояний неизвестны, мы видим, что незначительная часть ретроградных MNP-эндосом обнаруживает длинные стационарные состояния внутри аксонов.Основываясь на аналогичном анализе влияния перпендикулярных магнитных сил, мы обнаружили, что эти стационарные состояния ретроградных MNP-эндосом прочно закреплены внутри аксонов.
Большинство приостановленных эндосом минимально подвержены влиянию магнитных сил, что указывает на связанные состояния во время пауз. A) Траектория ретроградной MNP-эндосомы (Y в зависимости от времени) в присутствии перпендикулярной магнитной силы ~ 5,7 пН. B) Дорожка Y-X эндосомы MNP показана относительно края микромагнита (правая панель).Серые стрелки указывают на приостановленные состояния MNP-эндосомы.
Обсуждение
В этой работе мы сообщаем о крупном техническом достижении, которое позволяет нам управлять движением аксональных эндосом в живых нейронах с помощью неинвазивных магнитных сил. Мы демонстрируем доказательство концепции, согласно которой аксональные эндосомы можно контролируемо захватывать и высвобождать в наших прототипах SMD. Наша методология может быть дополнительно оптимизирована за счет более сложных конструкций геометрии микромагнита с острым концом и настройки MNP.Например, замена прямоугольных магнитов ромбовидными формами с острой кривизной кончика может увеличить магнитные градиенты и, следовательно, силы на эндосомы MNP. Выбор материала из магнитомягкого сплава и материала для MNP также является жизнеспособным улучшением. Кроме того, используя узкий диапазон размеров MNPs, как описано в литературе 40 , мы ожидаем однородного диапазона сил для более эффективного контроля над всеми нагруженными MNP эндосомами в аксонах.
Хотя наша работа была сосредоточена на ретроградных эндосомах, покрытых лектином, наш подход может быть легко применен для манипулирования ретроградными и антероградными эндосомами, несущими факторы роста, такие как NGF и BDNF, которые опосредуют ключевые сигнальные пути в нейронах 6,41,42 . Пространственная локализация сигнальных эндосом внутри аксонов с использованием неинвазивных внешних сил — прекрасная перспектива для исследования A) функционального взаимодействия между транспортировкой грузов на большие расстояния и передачей сигналов и B) локальных и дальних сигнальных механизмов, опосредованных грузом, в нейронах. Использование микромагнита с острыми кончиками геометрии может также позволить контролируемую индукцию аксональных пробок с точным пространственным контролем вдоль аксонов. Это может открыть новые возможности для исследования реакции нейронов на пробки и дать новое понимание причинных связей между нарушением транспорта и механизмами нейродегенерации.
Пространственная локализация сигнальных эндосом внутри аксонов с использованием неинвазивных внешних сил — прекрасная перспектива для исследования A) функционального взаимодействия между транспортировкой грузов на большие расстояния и передачей сигналов и B) локальных и дальних сигнальных механизмов, опосредованных грузом, в нейронах. Использование микромагнита с острыми кончиками геометрии может также позволить контролируемую индукцию аксональных пробок с точным пространственным контролем вдоль аксонов. Это может открыть новые возможности для исследования реакции нейронов на пробки и дать новое понимание причинных связей между нарушением транспорта и механизмами нейродегенерации.
Материалы и методы
Подробное описание обработки данных и экспериментальных методов (включая конъюгацию наночастиц с флуорофорами и WGA, визуализацию аксонального транспорта в мягких магнитно-микрофлюидных устройствах с использованием косого освещения) представлено в дополнительной информации.
Вклад авторов
P.D.C., B.C. разработал исследование, а P.D.C., A.F.M., Y. L. провели исследование и анализ данных. A.F.M., C.X. способствовал изготовлению магнитных устройств, а Ю.О., D.L.C., внесла свой вклад в рассечение и культивирование нейронов. C.X., L.H., C.O., S.W. внес вклад в разработку устройства и определение характеристик наночастиц. P.D.C., B.C. написал рукопись.
Конкурирующие финансовые интересы
Авторы заявляют об отсутствии конкурирующих финансовых интересов.
Благодарности
Эта работа поддержана Национальным институтом здравоохранения США (DP2-NS082125) и Национальным научным фондом (награды № 1055112 и 1344302). А.Ф.М. благодарит за поддержку стипендию Stanford Bio-X Bowes Graduate Fellowship.
Рынок стеклянных манипуляторов до 2022 г., конкурентный анализ размера, глобальных тенденций, развития бизнеса, состояния CAGR, возможностей роста и прогноза до 2027 г.
Отдел новостей MarketWatch не участвовал в создании этого контента.
15 декабря 2021 г. (Expresswire) — «Итоговый отчет добавит анализ воздействия COVID-19 на эту отрасль»
Глобальный отчет «Рынок стеклянных манипуляторов» описывает подробное исследование будущих возможностей роста, технических характеристик продуктов, конкурентной среды по ключевым игрокам, доле и размеру отрасли. предварительный расчет.Кроме того, в этот отчет включена информация о тенденциях роста Glass Manipulator по регионам, отраслевым сегментам, драйверам, ключевым областям деятельности, SWOT-анализу и проблемам рынка.
Получить образец отчета — http://www.industryresearch.co/enquiry/request-sample/19634626
О рынке стеклянных манипуляторов:
Стеклянный манипулятор — это устройство для перемещения стекла. Он использует вакуумную технологию для поглощения стекла для достижения безопасного и быстрого эффекта.Он может обрабатывать все типы стекла, толстые, тонкие, двухслойные стеклопакеты и узорчатое стекло. Оснащен системой безопасности, такой как сигнализация низкого напряжения и т. Д. Он может использоваться во многих отраслях промышленности, таких как стекольная, строительная, автомобильная и транспортная.
Оснащен системой безопасности, такой как сигнализация низкого напряжения и т. Д. Он может использоваться во многих отраслях промышленности, таких как стекольная, строительная, автомобильная и транспортная.
Анализ и аналитика рынка: глобальный рынок стеклянных манипуляторов
Мировой рынок стеклянных манипуляторов оценивался в млн долларов США в 2020 году, и ожидается, что к концу 2027 года он достигнет млн долларов США, а в 2021-2027 годах будет расти в среднем на%.
Мировой рынок стеклянных манипуляторов: движущие силы и сдерживающие факторы
В исследовательский отчет включен анализ различных факторов, способствующих росту рынка.Он представляет собой тенденции, ограничения и движущие силы, которые трансформируют рынок в положительную или отрицательную сторону. В этом разделе также представлены различные сегменты и приложения, которые потенциально могут повлиять на рынок в будущем. Подробная информация основана на текущих тенденциях и исторических событиях. В этом разделе также представлен анализ объема производства на мировом рынке и по каждому типу с 2016 по 2027 год.![]() В этом разделе упоминается объем производства PPPP
В этом разделе упоминается объем производства PPPP
Список основных игроков в отчете о рынке стеклянных манипуляторов: —
● Bailey Cranes ● Dalmec ● ERGOFLEX ● Famatec ● GGR ● Kilner Vacuumation ● Manibo ● Movomech AB ● TAWI ● Volumec ● Manitex VallaДля получения дополнительной информации, запроса или настройки перед покупкой посетите сайт http: // www.industryresearch.co/enquiry/pre-order-enquiry/19634626
Глобальный рынок стеклянных манипуляторов: региональный анализ
Анализируется рынок стеклянных манипуляторов, и информация о размере рынка предоставляется по регионам (странам). Отчет включает объем рынка по странам и регионам за период 2016-2027 гг. Он также включает размер рынка и прогноз по типам и сегментам приложений с точки зрения продаж и выручки на период 2016-2027 гг.
Объем рынка стеклянных манипуляторов по типам:
● Электроэнергия ● Гидравлическая мощность ● ДругоеРазмер рынка стеклянных манипуляторов по областям применения:
● Строительство ● Автомобиль ● Танспорт ● ДругоеОтчет о рынке стеклянных манипуляторов содержит всесторонний анализ
● Ключевые сегменты и подсегменты рынка ● Развитие рыночных тенденций и динамики ● Изменение сценариев спроса и предложения ● Количественная оценка рыночных возможностей Glass Manipulator с помощью определения размера рынка и прогнозирования рынка ● Отслеживание текущих тенденций / возможностей / проблем ● Анализ конкуренции ● Отображение возможностей с точки зрения технологические прорывы Получить образец отчета — http: // www. index.by , перспективы, проблемы, тенденции, динамика рынка, размер и рост, анализ конкуренции, анализ основных конкурентов. ● Отчет признает ключевые факторы роста и проблемы ключевых игроков отрасли. Кроме того, оценивается будущее влияние ракетного топлива и лимитов на рынок.● Раскрывает потенциальные потребности на рынке стеклянных манипуляторов. ● Отчет о рынке Glass Manipulator обеспечивает углубленный анализ изменения динамики конкуренции. ● Предоставляет информацию об историческом и текущем размере рынка, а также о будущем потенциале рынка.
index.by , перспективы, проблемы, тенденции, динамика рынка, размер и рост, анализ конкуренции, анализ основных конкурентов. ● Отчет признает ключевые факторы роста и проблемы ключевых игроков отрасли. Кроме того, оценивается будущее влияние ракетного топлива и лимитов на рынок.● Раскрывает потенциальные потребности на рынке стеклянных манипуляторов. ● Отчет о рынке Glass Manipulator обеспечивает углубленный анализ изменения динамики конкуренции. ● Предоставляет информацию об историческом и текущем размере рынка, а также о будущем потенциале рынка.
Географические регионы, охваченные в обзоре рынка Glass Manipulator:
● Северная Америка (США и Канада) Размер рынка, рост в годовом исчислении, анализ участников рынка и прогноз возможностей ● Рынок Латинской Америки (Бразилия, Мексика, Аргентина, остальные страны Латинской Америки) размер, рост по сравнению с аналогичным периодом прошлого года, анализ участников рынка и перспективы возможностей ● Европа (U.К., Германия, Франция, Италия, Испания, Венгрия, Бельгия, Нидерланды и Люксембург, NORDIC (Финляндия, Швеция, Норвегия, Дания), Ирландия, Швейцария, Австрия, Польша, Турция, Россия, остальные страны Европы), Польша, Турция , Россия, остальные страны Европы) Размер рынка, анализ участников рынка в годовом исчислении и прогноз возможностей ● Азиатско-Тихоокеанский регион (Китай, Индия, Япония, Южная Корея, Сингапур, Индонезия, Малайзия, Австралия, Новая Зеландия, остальные страны Азиатско-Тихоокеанского региона) размер, рост по сравнению с аналогичным периодом прошлого года, анализ участников рынка и перспективы возможностей Приобрести этот отчет (цена 2900 долларов США за однопользовательскую лицензию) — http: // www. industryresearch.co/purchase/19634626
industryresearch.co/purchase/19634626
Рынок стеклянных манипуляторов TOC охватывает следующие пункты:
1 Обзор рынка стеклянных манипуляторов
1.1 Обзор продукта и объем
1.2 Сегмент стеклянных манипуляторов по типу
1.2.1 Размер мирового рынка Анализ темпов роста по типам 2021 VS 2027
1.3 Сегмент стеклянных манипуляторов по приложениям
1.3.1 Сравнение глобального потребления по приложениям: 2016 VS 2021 VS 2027
1.4 Перспективы роста мирового рынка
1.4.1 Оценки и прогнозы мировых доходов (2016-2027)
1.4.2 Оценки и прогнозы мирового производства (2016-2027)
1.5 Размер мирового рынка по регионам
1.5.1 Мировой рынок Оценки и прогнозы размеров по регионам: 2016 VS 2021 VS 2027
1.5.2 Оценки и прогнозы отрасли Северной Америки (2016-2027)
1.5.3 Оценки и прогнозы отрасли Европы (2016-2027)
1.5.4 Промышленность Китая Оценки и прогнозы (2016-2027)
1. 5.5 Оценки и прогнозы промышленности Японии (2016-2027)
5.5 Оценки и прогнозы промышленности Японии (2016-2027)
2 Конкуренция на рынке со стороны производителей
2.1 Доля мирового рынка промышленной продукции по производителям (2016-2021)
2.2 Доля мирового рынка выручки по производителям (2016-2021)
2.3 Доля рынка стеклянных манипуляторов по типу компании (уровень 1, уровень 2 и уровень 3)
2.4 Средняя мировая цена по производителям (2016-2021 гг.)
2.5 Производственные площадки производителей, обслуживаемая территория, типы продукции
2.6 Конкурентная ситуация и тенденции на рынке стеклянных манипуляторов
2.6.1 Уровень концентрации рынка
2.6.2 Доля рынка 5 и 10 крупнейших игроков на рынке стеклянных манипуляторов по выручке
2.6.3 Слияния и поглощения, расширение
3 Производство и мощность по регионам
3.1 Доля мирового рынка стеклянных манипуляторов по регионам (2016-2021)
3.2 Доля мирового рынка в доходах по регионам (2016-2021)
3. 3 Мировое производство, выручка, цена и валовая прибыль (2016-2021)
3 Мировое производство, выручка, цена и валовая прибыль (2016-2021)
3.4 Производство в Северной Америке
3.4.1 Темпы роста производства на рынке Северной Америки (2016-2021)
3.4.2 Рынок Северной Америки Производство, выручка, цена и валовая прибыль (2016-2021)
3.5 Производство стеклянных манипуляторов в Европе
3.5.1 Темпы роста производства на европейском рынке (2016-2021)
3.5.2 Производство на европейском рынке, выручка, цена и валовая прибыль (2016-2021)
3.6 Производство стеклянных манипуляторов в Китае
3.6.1 Темпы роста производства на рынке Китая (2016-2021)
3.6.2 Производство на китайском рынке, выручка, цена и валовая маржа (2016-2021)
3,7 Производство стеклянных манипуляторов в Японии
3,7 .1 Темпы роста производства на рынке Японии (2016-2021)
3.7.2 Производство на японском рынке, выручка, цена и валовая маржа (2016-2021)
4 Глобальное потребление стеклянных манипуляторов по регионам
4. 1 Мировое потребление по регионам
1 Мировое потребление по регионам
4.1.1 Мировое потребление по регионам
4.1.2 Доля мирового рынка потребления по регионам
4.2 Северная Америка
4.2.1 Северная Америка Потребление по странам
4.2.2 США
4.2 .3 Канада
4.3 Европа
4.3.1 Потребление в Европе по странам
4.3.2 Германия
4.3.3 Франция
4.3.4 Великобритания
4.3.5 Италия
4.3,6 Россия
4,4 Азиатско-Тихоокеанский регион
4.4.1 Азиатско-Тихоокеанский регион Потребление по регионам
4.4.2 Китай
4.4.3 Япония
4.4.4 Южная Корея
4.4.5 Тайвань
4.4.6 Юго-Восточная Азия
4.4.7 Индия
4.4.8 Австралия
4.5 Латинская Америка
4.5.1 Латинская Америка Потребление по странам
4.5.2 Мексика
4.5.3 Бразилия
5 Производство, выручка, динамика цен по типу
5.1 Доля мирового рынка продукции по типу (2016-2021)
5. 2 Доля мирового рынка доходов по типу (2016-2021)
2 Доля мирового рынка доходов по типу (2016-2021)
5.3 Мировая цена по типу (2016-2021)
6 Анализ потребления по приложениям
6.1 Доля мирового рынка потребления по приложениям (2016-2021)
6.2 Глобальные темпы роста потребления по приложениям (2016-2021)
Профиль 7 ключевых компаний
8 Анализ затрат на производство стеклянных манипуляторов
8.1 Анализ ключевого сырья
8.1.1 Основное сырье
8.1.2 Динамика цен на основное сырье
8.1.3 Ключевые поставщики сырья
8.2 Доля в структуре производственных затрат
8.3 Анализ производственного процесса стеклянного манипулятора
8.4 Анализ производственной цепочки
9 Маркетинговый канал, дистрибьюторы и клиенты
9.1 Маркетинговый канал
9.2 Список дистрибьюторов
9.3 Клиенты
10 Динамика рынка
10.1 Тенденции развития отрасли
10. 2 Драйверы роста
2 Драйверы роста
10.3 Рыночные вызовы
10.4 Ограничения рынка
11 Прогноз производства и предложения
11.1 Глобальное производство стекла, прогнозируемое по регионам 2022-2027)
11.2 Производство в Северной Америке, прогноз доходов (2022-2027)
11.3 Производство в Европе, прогноз доходов (2022-2027)
11.4 Производство в Китае, прогноз выручки (2022-2027)
11,5 Япония Производство, прогноз выручки (2022-2027)
12 Прогноз потребления и спроса
12.1 Анализ глобального прогнозируемого спроса на стеклянный манипулятор
12,2 Прогнозируемое потребление в Северной Америке промышленности по странам
12.3 Прогнозируемое потребление промышленности на европейском рынке по странам
12.4 Прогнозируемое потребление промышленности в Азиатско-Тихоокеанском регионе по регионам
12.5 Прогноз потребления в промышленности в Латинской Америке по странам
13 Прогноз по типам и приложениям (2022-2027)
13. 1 Глобальное производство, выручка и прогноз цен по типам (2022-2027)
1 Глобальное производство, выручка и прогноз цен по типам (2022-2027)
13.1.1 Глобальное прогнозируемое производство промышленности по типу (2022-2027)
13.1.2 Глобальный прогнозируемый доход отрасли по типу (2022-2027)
13.1.3 Глобальная прогнозируемая цена отрасли по типу (2022-2027)
13.2 Глобальное прогнозируемое потребление Отрасль по областям применения (2022-2027)
14 Результаты исследования и выводы
15 Методология и источник данных
15.1 Методология / исследовательский подход
15.1.1 Исследовательские программы / дизайн
15.1.2 Оценка размера рынка
15.1.3 Структура рынка и триангуляция данных
15.2 Источник данных
15.2.1 Вторичные источники
15.2.2 Первичные Источники
15.3 Список авторов
15.4 Заявление об ограничении ответственности
Продолжение…
Свяжитесь с нами:
Имя: Г-н Аджай Подробнее
Телефон: США + (14) 24 253 0807
UK + (44) 203 239 8187
Идентификатор электронной почты: sales @ industryresearch. co
co
Другие наши отчеты:
Рынок эластомерных укупорочных средств SWOT-анализ на 2022 год Глобальные тенденции, возможности роста, динамика, конкурентный анализ размера, драйверов, типов, областей применения и прогноза до 2027 года Доля рынка микрошприцев, среднегодовой темп роста, типы, ведущие производители , Сегменты, размер отрасли, последние тенденции и прогноз до 2026 г.
Рынок морских аккумуляторов Среднегодовой темп роста в 2022 г., доля, глобальный рост, ключевые производители, предстоящий спрос, размер отрасли и прогноз до 2027 г.
Доля рынка добавок рыбьего жира, будущие тенденции, размер , Приложения, типы, ведущие игроки, драйверы и прогноз на 2021-2026 гг.
Рынок орехов пекан 2021: ведущие игроки, оценка размера рынка, фактор роста, будущие тенденции, драйверы и прогноз до 2026 г.
Рынок формованной пластмассовой упаковки 2021: рост Перспективы, последние тенденции, доля отрасли, стратегия развития и прогноз до 2026 г.
Доля рынка балансных зарядных устройств, ведущие производители, G Фактор rowth, размер отрасли, будущие тенденции и прогноз до 2026 г.
Рынок порционных упаковок Среднегодовой темп роста 2022 г., доля отрасли, типы, применения, ключевые сегменты, оценка размера, возможности и прогноз до 2027 г.
Доля рынка линейного алкилбензола (LAB), размер , Ключевые стратегии, ведущие производители, возможности, перспективы роста и прогноз до 2026 г.
Рынок ИТ-решений для здравоохранения до 2021 г .: перспективы роста, последние тенденции, доля отрасли, стратегия развития и прогноз до 2026 г. посмотреть оригинальную версию на сайте Express Wire посетите Рынок стеклянных манипуляторов 2022 г., Конкурентный анализ размера, глобальных тенденций, развития бизнеса, состояния CAGR, возможностей роста и прогноза до 2027 г.
COMTEX_398970255 / 2598 / 2021-12-15T08: 06: 46
Есть ли проблемы с этим пресс-релизом? Свяжитесь с поставщиком исходного кода Comtex по адресу editorial @ comtex. com. Вы также можете связаться со службой поддержки клиентов MarketWatch через наш Центр поддержки клиентов.
com. Вы также можете связаться со службой поддержки клиентов MarketWatch через наш Центр поддержки клиентов.
Отдел новостей MarketWatch не участвовал в создании этого контента.
Манипуляции с электроосмотическим потоком в стеклянных микрочипах и микрочипах из ПММА в отношении специфических ферментативных определений глюкозы
Q Ван Y Клык (2004) J Chromatogr B 812 309 Вхождение Ручка 10.1016 / j.jchromb.2004.09.027
Артикул Google Scholar
J
Ван
(2001) Электроанализ 13 983
Вхождение
Ручка 10. 1002 / 1521-4109 (200108) 13:12 <983 :: AID-ELAN983> 3.0.CO; 2- #
1002 / 1521-4109 (200108) 13:12 <983 :: AID-ELAN983> 3.0.CO; 2- #
Артикул Google Scholar
Вудворд Дж. Р., Спокан Р. Б. (1998) Коммерческие биосенсоры: приложения к клиническим, биотехнологическим и экологическим образцам. В: Ramsay G (ed) John Wiley & Sons, Inc., Нью-Йорк, стр. 227
G A M Mersal M Ходари U Билитовский (2004) Биосенсоры и биоэлектроника 20 305
Google Scholar
я
Ром
M
Генрих
W
Кольер
U
Билитовский
(1996) Аналитик 121 877
Вхождение
Ручка 10. 1039 / an9962100877
1039 / an9962100877
Артикул Google Scholar
M Ж Кардози А П Ф Тернер (1991) Adv Биосенсоры 1 125
Google Scholar
C
Хименес
J
Бартроли
N
де Рой
M
Куделка-Хеп
(1995) Sens Приводы B 26–27 421
Вхождение
Ручка 10. 1016 / 0925-4005 (94) 01631-Q
1016 / 0925-4005 (94) 01631-Q
Артикул Google Scholar
M Альварес-Икаса U Билитовский (1993) анальный химический 65 525
Google Scholar
J Хандурина А Гуттман (2002) J Chromatogr A 943 159 Вхождение Ручка 10.1016 / S0021-9673 (01) 01451-0 Вхождение Ручка11833638
Артикул PubMed Google Scholar
А Дж
де Мелло
N
Борода
(2003) Лабораторный чип 3 11N
Вхождение
Ручка 10. 1039 / b301019h
Вхождение
Ручка: 15106602
1039 / b301019h
Вхождение
Ручка: 15106602
Артикул PubMed Google Scholar
Y Татибана K Оцука S Терабе А Араи K Сузуки S Накамура (2003) J Chromatogr A 1011 181 Вхождение Ручка 10.1016 / S0021-9673 (03) 01181-6 Вхождение Ручка: 14518775
Артикул PubMed Google Scholar
Б М
Paegel
R G
Blazej
R A
Mathies
(2003) Curr Op Biotechnol 14 42
Вхождение
Ручка 10. 1016 / S0958-1669 (02) 00004-6
1016 / S0958-1669 (02) 00004-6
Артикул Google Scholar
C-C Линь G B Ли S H Чен (2002) Электрофорез 23 3550 Вхождение Ручка 10.1002 / 1522-2683 (200210) 23:20 <3550 :: AID-ELPS3550> 3.0.CO; 2-A Вхождение Ручка12412124
Артикул PubMed Google Scholar
п
Митчелл
(2001) Nature Biotechnol 19 717
Вхождение
Ручка 10. 1038/
1038/
Артикул Google Scholar
B H Weigl R L Барделл C R Кабрера (2003) Adv. Доставка лекарств Ред. 55 349 Вхождение Ручка 10.1016 / S0169-409X (02) 00223-5
Артикул Google Scholar
J G E
Садовники
А
ван ден Берг
(2004) Анал Биоанал Химия 378 1700
Вхождение
Ручка 10. 1007 / s00216-003-2435-7
Вхождение
Ручка: 14758457
1007 / s00216-003-2435-7
Вхождение
Ручка: 14758457
Артикул PubMed Google Scholar
J Ван (2002) Таланта 56 223 Вхождение Ручка 10.1016 / S0039-9140 (01) 00592-6
Артикул Google Scholar
ЧАС
Андерссон
А
ван ден Берг
(2003) Sens и Act B 92 315
Вхождение
Ручка 10. 1016 / S0925-4005 (03) 00266-1
1016 / S0925-4005 (03) 00266-1
Артикул Google Scholar
J P Landers (2003) анальный химический 75 2919 Вхождение Ручка 10.1021 / ac0301705 Вхождение Ручка12945796
Артикул PubMed Google Scholar
U
Билитовский
M
Генрих
S
Kadow
г
Mersal
(2003) Анал Биоанал Химия 377 556
Вхождение
Ручка 10. 1007 / s00216-003-2179-4
Вхождение
Ручка: 14504677
1007 / s00216-003-2179-4
Вхождение
Ручка: 14504677
Артикул PubMed Google Scholar
J Лихтенберг N F де Рой E Verpoorte (2002) Таланта 56 233 Вхождение Ручка 10.1016 / S0039-9140 (01) 00593-8
Артикул Google Scholar
B J
Кирби
E F
Hasselbrink
СуффиксJr
(2004) Электрофорез 25 187
Вхождение
Ручка 10. 1002 / elps.200305754
Вхождение
Ручка: 14743473
1002 / elps.200305754
Вхождение
Ручка: 14743473
Артикул PubMed Google Scholar
МОЙ Бадал M Вонг N Хим ЧАС Салими-Моосави D J Харрисон (2002) J Chromatogr A 947 277 Вхождение Ручка 10.1016 / S0021-9673 (01) 01601-6 Вхождение Ручка11883661
Артикул PubMed Google Scholar
P G
Ригетти
C
Гельфи
B
Вергола
L
Castelletti
(2001) Электрофорез 22 603
Вхождение
Ручка 10. 1002 / 1522-2683 (200102) 22: 4 <603 :: AID-ELPS603> 3.0.CO; 2-N
Вхождение
Ручка11296915
1002 / 1522-2683 (200102) 22: 4 <603 :: AID-ELPS603> 3.0.CO; 2-N
Вхождение
Ручка11296915
Артикул PubMed Google Scholar
Y Лю J C Fanguy Дж М Bledsoe C S Генри (2000) анальный химический 72 5939 Вхождение Ручка 10.1021 / ac000932l Вхождение Ручка11140760
Артикул PubMed Google Scholar
C A
Люси
R S
Андерхилл
(1996) анальный химический 68 300
Вхождение
Ручка 10.![]() 1021 / ac950632h
1021 / ac950632h
Артикул Google Scholar
К К С Юнг C A Люси (1998) J Chromatogr A 804 319 Вхождение Ручка 10.1016 / S0021-9673 (97) 00957-6
Артикул Google Scholar
J B
Ким
J P
Quirino
K
Оцука
S
Терабе
(2001) J Chromatogr A 916 123
Вхождение
Ручка 10. 1016 / S0021-9673 (01) 00566-0
Вхождение
Ручка11382284
1016 / S0021-9673 (01) 00566-0
Вхождение
Ручка11382284
Артикул PubMed Google Scholar
J E Мелансон N E Барыла C A Люси (2000) анальный химический 72 4110 Вхождение Ручка 10.1021 / ac000335z Вхождение Ручка10994971
Артикул PubMed Google Scholar
J C
Макдональдс
ОКРУГ КОЛУМБИЯ
Даффи
J R
Андерсон
D T
Чиу
ЧАС
Ву
О Дж А
Schueller
G M
Whitesides
(2000) Электрофорез 21 27
Вхождение
Ручка 10. 1002 / (SICI) 1522-2683 (20000101) 21: 1 <27 :: AID-ELPS27> 3.0.CO; 2-C
Вхождение
Ручка
1002 / (SICI) 1522-2683 (20000101) 21: 1 <27 :: AID-ELPS27> 3.0.CO; 2-C
Вхождение
Ручка
Артикул PubMed Google Scholar
ЧАС Беккер L E Locascio (2002) Таланта 56 267 Вхождение Ручка 10.1016 / S0039-9140 (01) 00594-X
Артикул Google Scholar
J S
Buch
ПК
Ван
D L
DeVoe
C S
Ли
(2001) Электрофорез 22 3902
Вхождение
Ручка 10. 1002 / 1522-2683 (200110) 22:18 <3902 :: AID-ELPS3902> 3.0.CO; 2-K
Вхождение
Ручка11700719
1002 / 1522-2683 (200110) 22:18 <3902 :: AID-ELPS3902> 3.0.CO; 2-K
Вхождение
Ручка11700719
Артикул PubMed Google Scholar
B J Кирби E F Hasselbrink СуффиксJr (2004) Электрофорез 25 203 Вхождение Ручка 10.1002 / elps.200305755 Вхождение Ручка: 14743474
Артикул PubMed Google Scholar
W
Сюй
K
Учияма
Т
Симосака
Т
Бродяга
(2001) J Chromatogr A 907 279
Вхождение
Ручка 10. 1016 / S0021-9673 (00) 01074-8
Вхождение
Ручка11217035
1016 / S0021-9673 (00) 01074-8
Вхождение
Ручка11217035
Артикул PubMed Google Scholar
J
Ван
M
Пумера
M P
Чатрати
А
Escarpa
р
Конрад
А
Грибель
W
Дёрнер
ЧАС
Löwe
(2002) Электрофорез 23 596
Вхождение
Ручка 10. 1002 / 1522-2683 (200202) 23: 4 <596 :: AID-ELPS596> 3.0.CO; 2-C
Вхождение
Ручка11870771
1002 / 1522-2683 (200202) 23: 4 <596 :: AID-ELPS596> 3.0.CO; 2-C
Вхождение
Ручка11870771
Артикул PubMed Google Scholar
N E Барыла C A Люси (2002) J Chromatogr A 956 271 Вхождение Ручка 10.1016 / S0021-9673 (01) 01516-3 Вхождение Ручка12108661
Артикул PubMed Google Scholar
N E
Барыла
J E
Мелансон
M T
Макдермотт
C A
Люси
(2001) анальный химический 73 4558
Вхождение
Ручка 10. 1021 / ac0105134
Вхождение
Ручка11605831
1021 / ac0105134
Вхождение
Ручка11605831
Артикул PubMed Google Scholar
J L Beckers п Бочек (2002) Электрофорез 23 1947 г. Вхождение Ручка 10.1002 / 1522-2683 (200206) 23:12 <1947 :: AID-ELPS1947> 3.0.CO; 2-M Вхождение Ручка12116141
Артикул PubMed Google Scholar
Ода Р. П., Ландерс Дж. П. (1994) В: Справочник по капиллярному электрофорезу, глава 2. В: Ландерс Дж. П. (изд.) CRC Press Boca Raton, p 10
П. (изд.) CRC Press Boca Raton, p 10
F Черт возьми L Чжан ЧАС Хагивара Y Мишина Y Баба (2003) Электрофорез 24 714 Вхождение Ручка 10.1002 / elps.2003
Вхождение Ручка12601743
Артикул PubMed Google Scholar
M
Сано
K
Уэно
ЧАС
Камимори
(2003) J Chromatogr B 794 149
Вхождение
Ручка 10. 1016 / S1570-0232 (03) 00450-1
1016 / S1570-0232 (03) 00450-1
Артикул Google Scholar
K D Ллойд ЧАС Wätzig (1995) J Chromatogr B 663 400
Google Scholar
г
Ocvirk
M
Манро
Т
Тан
р
Олещук
K
Вестра
D J
Харрисон
(2000) Электрофорез 21 107
Вхождение
Ручка 10.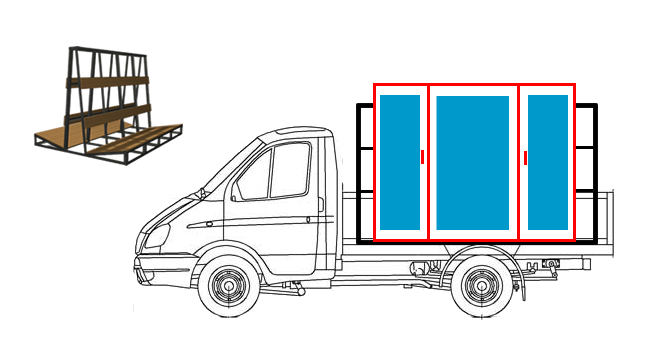 1002 / (SICI) 1522-2683 (20000101) 21: 1 <107 :: AID-ELPS107> 3.0.CO; 2-Y
Вхождение
Ручка
1002 / (SICI) 1522-2683 (20000101) 21: 1 <107 :: AID-ELPS107> 3.0.CO; 2-Y
Вхождение
Ручка
Артикул PubMed Google Scholar
Как доехать до Osteopathic Manipulative & Medical Treatments в Tulsa на автобусе?
Общественный транспорт до остеопатических манипуляций и медицинских процедур в Талсе
Не знаете, как доехать до Остеопатические манипуляции и медицинские процедуры в Tulsa, США? Moovit поможет вам найти лучший способ добраться до Остеопатическое лечение и лечение от ближайшей остановки общественного транспорта, используя пошаговые инструкции.
Moovit предоставляет бесплатные карты и маршруты в реальном времени, которые помогут вам сориентироваться в вашем городе. Открывайте расписания, маршруты, часы работы и узнайте, сколько займет дорога до Остеопатические манипулятивные и медицинские процедуры в режиме реального времени.
Вы можете доехать до Osteopathic Manipulative & Medical Treatments на автобусе.У этих линий и маршрутов есть остановки поблизости: Автобус: 112, 221
Хотите узнать, есть ли другой маршрут, который приведет вас туда раньше? Moovit поможет вам найти альтернативные маршруты или время. Получите инструкции, как легко доехать до или от Остеопатические манипуляции и медицинские процедуры с помощью приложения или сайте Moovit.
С нами добраться до Остеопатические манипуляции и медицинские процедуры проще простого. Именно поэтому более 930 миллионов пользователей, включая жителей Талсы, доверяют Moovit как лучшему транспортному приложению.