Погрешность одометра и ГЛОНАСС
Друзья, на сегодняшний день есть очень много споров о том что показания ГЛОНАСС и показания штатного одометра/спидометра расходятся и для многих это становится даже большой темой для дискуссий, а в частности это разногласия начальников и водителей. Так давайте же рассмотрим эту проблему вместе и попытаемся разобраться, кто же все таки прав и чему стоит доверять, ГЛОНАССу или же штатному датчику скорости.
Наша компания уже долгое время занимается ГЛОНАСС/GPS мониторингом транспорта, тем самым у нас накопилось довольно много клиентов и каждый раз мы сталкиваемся с вопросом « по одометру автомобиль проехал 830 км, а ваш Глонасс показывает, что 800 км, почему так???» Ответ на самом деле прост. Подробно разберем конструкцию штатного механизма измеряющего скорость и пробег — одометра и спидометра и из чего складывается их погрешность:
Разберем что из себя представляет одометр и спидометр на автомобиле: это механические изделия измеряющие показания датчика скорости.
Исходя из документации ЕЭК ООН №39 (ГОСТ Р 41.39-99) спидометры не могут занижать показания и средняя погрешность по этой документации не превышает скорость движения более чем на 10% + 6 км/ч. Следовательно и погрешность измерения одометра будет увеличиваться на эту цифру так как одометр и спидометр являются единым устройством. По многолетнему опыту работы с транспортом, заводы производители завышают показания скорости и пробега авто на 6-10%. Скорее всего производители авто заботятся о своевременном прохождении ТО, увеличивают реальный пробег на 6-10% Опираясь на документацию указанную в ГОСТ Р 41.39-99.
В погрешности одометра не включены такие факторы как:- Размер колес очень существенно влияет на показания спидометра, а следовательно и одометра.
 Рассмотрим пример разницы пробега в диаметре колеса в 1 см, на 100 километров пробега автомобиля разница в пробеге составит 1950 м, если посчитать то с пробега на 10000 километров одометр покажет разницу в пробеге 195 километров: пример расчета: диметр одного колеса 1 метр, второго — 1.01 метр, окружность первого колеса — 3.141592, окружность второго колеса — 3.17300792. Первое совершит 31 831 оборотов на 100 км, второе — 31 515 на 100 км. Разница — 1950 м.Такая разница получается всего при 1 см. ! К примеру, разные колеса 325/60 и 325/65 на 5 сантиметров дадут сразу разницу в диаметре в 3.5 см. Поэтому показания одометра на автомобилях со стёртым протектором покажет большее значение по сравнению с автомобилем на новых шинах. Так же если установить и на автомобиль колеса не подходяще ему по радиусу показания будут сильно отличаться от реальных.
Рассмотрим пример разницы пробега в диаметре колеса в 1 см, на 100 километров пробега автомобиля разница в пробеге составит 1950 м, если посчитать то с пробега на 10000 километров одометр покажет разницу в пробеге 195 километров: пример расчета: диметр одного колеса 1 метр, второго — 1.01 метр, окружность первого колеса — 3.141592, окружность второго колеса — 3.17300792. Первое совершит 31 831 оборотов на 100 км, второе — 31 515 на 100 км. Разница — 1950 м.Такая разница получается всего при 1 см. ! К примеру, разные колеса 325/60 и 325/65 на 5 сантиметров дадут сразу разницу в диаметре в 3.5 см. Поэтому показания одометра на автомобилях со стёртым протектором покажет большее значение по сравнению с автомобилем на новых шинах. Так же если установить и на автомобиль колеса не подходяще ему по радиусу показания будут сильно отличаться от реальных. - Вес автомобиля имеет влияния на показания одометра — при полной загрузке автомобиля, шина проминается, следовательно, меняется диаметр колеса, следовательно, одометр будет считать в большую сторону пробег, нежели при пустом автомобиле.
- Давление в шинах — шина проминается при низком давлении. На давление влияет температура, при прогретых или перегретых шинах оно выше на холодную например зимой диаметр шины так же будет меньше.
- Скольжение колес или пробуксовке — при пробуксовках колес в грязи или же наоборот при блокировке колес на льду.
 Рассмотрим пример разницы пробега в диаметре колеса в 1 см, на 100 километров пробега автомобиля разница в пробеге составит 1950 м, если посчитать то с пробега на 10000 километров одометр покажет разницу в пробеге 195 километров: пример расчета: диметр одного колеса 1 метр, второго — 1.01 метр, окружность первого колеса — 3.141592, окружность второго колеса — 3.17300792. Первое совершит 31 831 оборотов на 100 км, второе — 31 515 на 100 км. Разница — 1950 м.Такая разница получается всего при 1 см. ! К примеру, разные колеса 325/60 и 325/65 на 5 сантиметров дадут сразу разницу в диаметре в 3.5 см. Поэтому показания одометра на автомобилях со стёртым протектором покажет большее значение по сравнению с автомобилем на новых шинах. Так же если установить и на автомобиль колеса не подходяще ему по радиусу показания будут сильно отличаться от реальных.
Рассмотрим пример разницы пробега в диаметре колеса в 1 см, на 100 километров пробега автомобиля разница в пробеге составит 1950 м, если посчитать то с пробега на 10000 километров одометр покажет разницу в пробеге 195 километров: пример расчета: диметр одного колеса 1 метр, второго — 1.01 метр, окружность первого колеса — 3.141592, окружность второго колеса — 3.17300792. Первое совершит 31 831 оборотов на 100 км, второе — 31 515 на 100 км. Разница — 1950 м.Такая разница получается всего при 1 см. ! К примеру, разные колеса 325/60 и 325/65 на 5 сантиметров дадут сразу разницу в диаметре в 3.5 см. Поэтому показания одометра на автомобилях со стёртым протектором покажет большее значение по сравнению с автомобилем на новых шинах. Так же если установить и на автомобиль колеса не подходяще ему по радиусу показания будут сильно отличаться от реальных.
Бесспорно много факторов влияет на показания одометра мы представили малый список параметров влияющих на показания одометра.
Бесспорно терминалы ГЛОНАСС/GPS имеют свою погрешность в измерении скорости и пробега, но их показания не привязаны: к диаметру колес, износу датчика скорости и весу груза и другим факторам, но все же у них есть погрешность. Погрешность ГЛОНАСС/GPS трекеров составляет 2-3 метра это 1,5% погрешности в пробеге. ГЛОНАСС/GPS трекер обладает возможностью изменение рельефа местности учитывая (широту, долготу высоту над уровнем моря), тем самым дает полноценную картину пробега в отчетах уже с учетом погрешности в 1%. Эта погрешность берется из-за плохого приема сигнала от спутников при определении координат на стоянка, в туннелях, под эстакадами и в гаражах, а так же при плохой погоде и не превышает 1%, начинает искажать маршрут, тем самым увеличивая или уменьшая пробег и показывая так называемые отклонения от маршрута на 3-5 метров фиксируя их как пройденный путь. Все выше перечисленные погрешности вполне укладываются в показания изменения пробега на 100 км в 10-100 метров.
Эта погрешность берется из-за плохого приема сигнала от спутников при определении координат на стоянка, в туннелях, под эстакадами и в гаражах, а так же при плохой погоде и не превышает 1%, начинает искажать маршрут, тем самым увеличивая или уменьшая пробег и показывая так называемые отклонения от маршрута на 3-5 метров фиксируя их как пройденный путь. Все выше перечисленные погрешности вполне укладываются в показания изменения пробега на 100 км в 10-100 метров.
Так все же вернемся к вопросу « кому же все таки верить, показаниям Глонасс/GPS или же все таки штатным датчикам ? После того как мы разобрались с погрешностями штатных датчиков уже самими производителями и ГЛОНАСС, смело можно отвечать, что современные технологии уже считают все за нас и показания Системы мониторинга будут куда точнее чем показания штатных одометра и спидометра. Но все же- если у вас остались вопросы по ГОСТу, то мы оставим для вас ссылку в которой все подробно написано о погрешностях, и кому все таки верить.
Как обмануть ГЛОНАСС. Часть первая — портим трекеры / Хабр
Водитель директору: «Я знаю 15 способов обмануть навигацию».Директор водителю: «А я знаю 27 способов понизить тебе зарплату».
О повсеместном внедрении ГЛОНАСС можно сказать много хорошего и плохого. В целом, затея отличная: мир достаточно давно использует спутниковые технологии в логистических целях и для снижения постоянных издержек на содержание транспорта. В России все перевернуто с ног на голову: подключение автопарка к системам GPS/ГЛОНАСС мониторинга инициировано сверху и насаждается порой там, где от него особого толка быть не может.
В тех случаях, когда внедрение ГЛОНАСС мониторинга абсолютно оправдано, процесс тормозят сотрудники компаний — особенно водители. В ход идет все: от открытого саботажа и вандализма до закона о неприкосновенности личной жизни. На специализированных форумах (например, здесь) операторы и интеграторы мониторинговых систем делятся друг с другом новыми способами издевательств над ни в чем не повинными ГЛОНАСС-терминалами. Я тут подумала и решила объединить все прочитанное и услышанное в личных беседах в одну статью: вредителям будет полезно знать, какие их уловки давно уже известны работодателям, а работодатели, напротив, узнают, с чем им придется столкнуться.
Я тут подумала и решила объединить все прочитанное и услышанное в личных беседах в одну статью: вредителям будет полезно знать, какие их уловки давно уже известны работодателям, а работодатели, напротив, узнают, с чем им придется столкнуться.
Самый распространенный вид саботажа — манипуляции над антенной и корпусом ГЛОНАСС-трекера. Кто-то, недолго думая, просто обрывает антенну, кто-то осторожно протыкает ее иголкой, кто-то обматывает фольгой весь блок или отдельные его детали, кто-то — как на картинке ниже — ставит на контроллер здоровенную железяку или магнит. Самые трудолюбивые и изобретательные водители делают специальный короб из свинца или другого металла, который полностью закрывает терминал. У всех этих действий общая цель — сделать невозможным прием сигнала от спутников.
И, безусловно, она была бы достигнута, если бы не одно «но»: установщики оборудования давно уже научились защищать приборы от подобных выходок. Некоторые операторы систем ГЛОНАСС-мониторинга изначально рекомендуют оборудование со встроенными антеннами — т.
С той же целью — отрезать ГЛОНАСС-приемник от навигационной сети — водители пытаются повредить систему питания: выдергивают предохранители, обрезают провода, меняют полярность питания и даже терзают несчастный прибор электрошокером. Начнем с того, что практически все модели контроллеров оборудованы системой резервного питания: т.
Пример поврежденного оборудования: дорожка обуглена из-за воздействия на цепь питания:
Но все, о чем я рассказывала выше, — это про технически подкованных водителей, которые знакомы с механизмом работы ГЛОНАСС-оборудования. Есть и те, кто предпочитает не вникать в тонкости — а просто вывести из строя ненавистную коробочку, мешающую безнаказанно гонять служебный транспорт по неслужебным делам. Такие ломают терминал целиком (чтобы уж точно), заливают его водой, вызывая короткое замыкание, — в общем, извращаются, как могут. Управа на них есть и имя ей — антивандальный корпус, прочная такая коробка, которую не так уж просто повредить.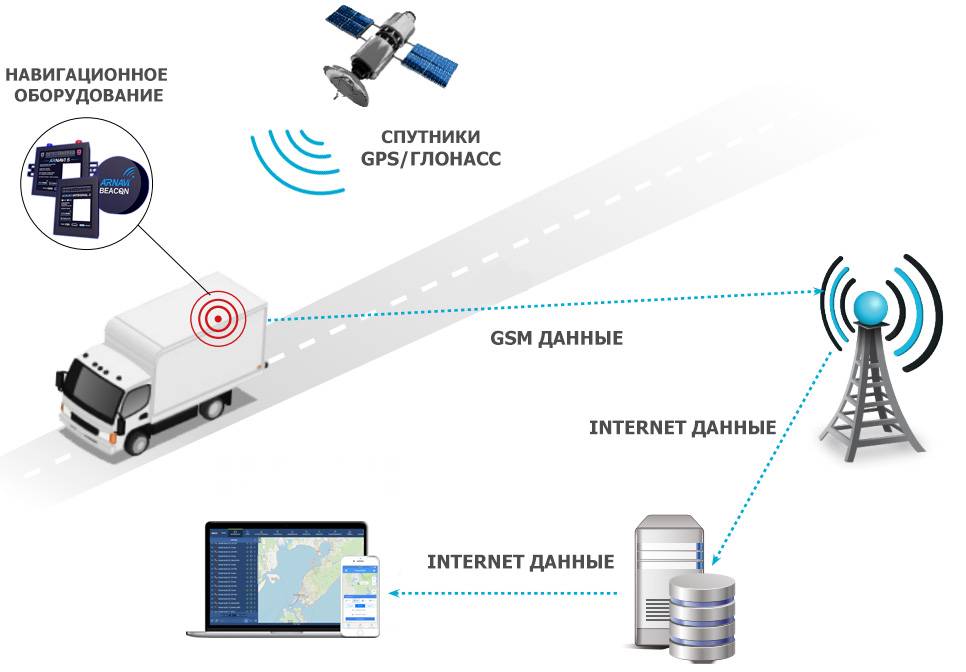
Защитить конкретный прибор от конкретного человека — задача, в принципе, простая. Хуже, когда сотрудники разных подразделений заключают между собой негласный договор — и саботируют работу дружной компанией. Например, водители могут все вместе жаловаться на неисправность оборудования и неточность его показаний, диспетчеры — умалчивать о «левых» рейсах, а механики — затягивать и затруднять процесс установки приборов на транспорт. Противоядие тут одно — менеджер, которому есть дело до результатов работы системы. Как показывает практика, государственным организациям, где нет собственника и гибкой системы премирования, не поможет никакая ни платная, ни бесплатная система спутникового мониторинга — хоть ГЛОНАСС, хоть GPS.
Конечно же, этот текст вряд ли тянет на практическое пособие «Как обмануть ГЛОНАСС и при этом не потерять работу», объединить все наработки креативных водителей в одном материале трудновато. Так что если я о чем-то забыла — пишите в комментариях, думаю, получится интересно и познавательно.
А я пока следующую серию подготовлю — про то, как обманывают датчики топлива. Там задачка на самом деле потруднее, чем со спутниковыми терминалами. Но это уже совсем другая история.
Отключить страну по щелчку. Что будет с миром, если GPS и ГЛОНАСС перестанут работать?
- Дэвид Хэмблинг
- BBC Future
Автор фото, Getty Images
Спутниковая навигация отвечает за то, чтобы современный мир работал. Многие из нас даже не догадываются обо всех — многочисленных! — вариантах ее применения. В то же время эта система очень уязвима — и тем уязвимей, чем более она продвинута. Случись что — чем можно ее заменить?
Когда летом прошлого года аэропорт имени Бен-Гуриона в Тель-Авиве внезапно стал испытывать сбои в работе системы GPS, только мастерство авиадиспетчеров помогло предотвратить серьезные происшествия. Помехи, которые создавали трудности для полетов на протяжении трех недель, по мнению специалистов Армии обороны Израиля, возникали из-за работы средств радиоэлектронной борьбы, применявшихся Россией в Сирии.![]()
В отношении международного израильского аэропорта это, конечно, произошло неумышленно, однако показывает, насколько опасными могут быть такие сбои в системе глобального позиционирования, всем известной как GPS.
«Мы все больше осознаем: GPS надо защищать, укреплять и расширять», — говорит Тодд Хамфрис, инженер систем спутниковой связи из Техасского университета в Остине (США).
Сейчас от GPS зависит множество наших повседневных задач.
В самом простом своем виде система сообщает нам, в каком именно месте на планете находится GPS-приемник — в любое время дня и ночи. Такие приемники есть в наших мобильных телефонах и автомобилях. Они позволяют судам прокладывать маршрут среди рифов и сложных каналов, исполняя роль своего рода современного маяка.
Аварийно-спасательные службы полагаются на GPS (и подобные ей национальные системы — как, например, российская ГЛОНАСС, европейская «Галилео» или китайская «Бэйдоу») для того, чтобы найти тех, кто попал в беду.
А вот применение, о котором далеко не все знают: порты не смогли бы работать без спутниковой навигации, потому что их кранам нужна GPS, чтобы находить нужный контейнер.
Системы спутниковой навигации играют важнейшую роль в логистических операциях, помогая доставлять товары и услуги точно и вовремя. Без этих систем полки магазинов быстро пустели бы, а цены были бы выше.
Строительная индустрия использует GPS при обследовании участков для строительства, а рыбаки — для соблюдения строгих правил, регламентирующих процесс ловли рыбы.
Автор фото, Getty Images
Подпись к фото,Без системы глобального позиционирования мы даже не сможем узнать, куда пошел наш кот
Однако GPS, как и любая другая спутниковая навигация, — это определение не только точного места, но и точного времени. На околоземной орбите кружат 30 спутников, использующих сверхточные атомные часы для синхронизации сигналов. Эти спутники помогают пользователям определять время с точностью до 100-миллиардной доли секунды.
Все сети мобильной связи используют время GPS для синхронизации их наземных станций, а финансовые институты и банки полагаются на него в своих операциях.
Как видим, без спутниковой навигации наша жизнь просто остановилась бы. Но есть ли что-то, чем можно заменить ту же GPS? Могли бы мы справиться без нее?
Согласно оценке Лондонской школы экономики, подготовленной по заказу британского правительства, всего пять дней без спутниковой навигации обойдутся стране более чем в 5,1 млрд фунтов стерлингов ($6,5 млрд).
Из-за отказа системы GPS американская экономика будет терять, по оценкам, один миллиард долларов в день, а если это случится в апреле и мае, когда у фермеров посевная, — то до полутора миллиардов в день.
И тем не менее сбои в работе GPS на удивление часты. Виновниками в некоторых районах мира часто бывают военные, когда тестируют новое оборудование или проводят учения. Правительство США тоже регулярно осуществляет испытания и учения, ведущие к обрыву спутникового сигнала. На работу спутниковых систем влияют и некоторые технические проблемы.
Конечно, кроме GPS, есть и другие подобные системы, о которых мы упоминали выше — все они работают на той же основе, что и GPS. В то же время с развитием технологий растет вероятность того, что в работу этих систем кто-то вмешается и умышленно создаст помехи, а то и вовсе отключит.
Автор фото, Getty Images
Подпись к фото,GPS, как и любая другая спутниковая навигация, — это определение не только точного места, но и точного времени
Особенно часто по этому поводу высказывают озабоченность те же военные, подчеркивает профессор Чарли Карри, научный сотрудник Королевского института навигации и учредитель британской компании Chronos Technology, которая, среди прочего, занимается проблемами синхронизации в спутниковых навигационных системах.
Военным есть о чем беспокоиться. Изначально спутниковая навигация была разработана Пентагоном, и сейчас ее применяют везде, от боевых кораблей до разведывательных дронов, от «умных бомб» до пехотинцев. И этой системе угрожает опасность.
И этой системе угрожает опасность.
Средства радиоэлектронного подавления GPS легко купить в интернете. Преступники могут их использовать для выведения из строя систем отслеживания украденных автомобилей — при этом совершенно не заботясь о том, кто еще может от этого пострадать.
Но есть и более серьезные опасности.
«Существует отдаленная угроза того, что вся сеть спутников GPS может быть выведена из строя — как прелюдия к войне, как нападение на важнейший элемент инфраструктуры, на экономику США», — говорит Хамфрис.
Но и силы природы могут быть столь же опасны. Так называемое «событие Кэррингтона», мощнейшая за историю наблюдений геомагнитная буря 1859 года, могла бы вывести из строя всю нынешнюю спутниковую сеть GPS.
Автор фото, Getty Images
Подпись к фото,Конечно, старая добрая карта поможет нам найти дорогу, но многие аспекты современной жизни уже просто невозможны без систем типа GPS
Итак, если GPS и ее спутниковые сестры вдруг откажут — какие у нас есть альтернативы? Что поможет нашему миру вновь заработать?
Одна из возможных резервных систем — новая версия радионавигационной системы наземного базирования LORAN (от английского Long Range Navigation), которая была разработана во время Второй мировой войны для помощи в навигации кораблям союзников, пересекающим Атлантику.![]() Вместо спутников использовались наземные передатчики с антеннами на мачтах 200-метровой высоты, передающие радионавигационные сигналы.
Вместо спутников использовались наземные передатчики с антеннами на мачтах 200-метровой высоты, передающие радионавигационные сигналы.
Поначалу LORAN имела точность в рамках нескольких миль, но к 1970-м годам она могла выдавать местонахождение с точностью до нескольких сотен метров.
В 2000-х, когда GPS сделала LORAN ненужной, в Британии и других странах разобрали ее передатчики, однако современная версия, известная как eLoran, может быть столь же точной, как GPS. Она использует усовершенствованные передатчики и приемники, а также так называемую дифференциальную коррекцию.
Такая версия, как говорят, способна определять местонахождение с точностью до 10 м и даже выше. В отличие от GPS, ее сигналы способны проникать сквозь стены зданий и тоннели — прежде всего потому, что эта система использует более низкую частоту большей мощности, чем спутниковые сигналы.
Сигналам eLoran куда труднее создать помехи — к тому же она не полагается на уязвимые спутники. Проблема только в том, что кто-то должен профинансировать ее развертывание. «eLoran — прекрасная технология, которая заполнит все пробелы в навигации, — говорит Хамфрис. — Если только будут серьезные намерения развернуть ее и поддерживать в рабочем состоянии».
Проблема только в том, что кто-то должен профинансировать ее развертывание. «eLoran — прекрасная технология, которая заполнит все пробелы в навигации, — говорит Хамфрис. — Если только будут серьезные намерения развернуть ее и поддерживать в рабочем состоянии».
Автор фото, Getty Images
Подпись к фото,Не только GPS: звезды помогут установить ваше место на планете с точностью до ста метров
Есть и другие подходы, которые не требуют дополнительной инфраструктуры. Задолго до изобретения радио мореплаватели находили путь в океане по солнцу и звездам, используя секстант для определения высоты Солнца и других космических объектов над горизонтом, чтобы узнать свои географические координаты.
Навигация по звездам жива и поныне. Вы удивитесь, но баллистические ракеты, подобные американским «Трайдентам», по-прежнему используют такую навигацию в полете.
Звезды помогут установить ваше место на планете с точностью до ста метров. Но американская компания Draper Laboratory разработала систему звездной навигации нового поколения под названием Skymark, использующую маленький автоматический телескоп для отслеживания (в дополнение к звездам) спутников, МКС и других объектов, вращающихся вокруг Земли.
Но американская компания Draper Laboratory разработала систему звездной навигации нового поколения под названием Skymark, использующую маленький автоматический телескоп для отслеживания (в дополнение к звездам) спутников, МКС и других объектов, вращающихся вокруг Земли.
А поскольку таких быстро движущихся объектов сейчас невероятно много, Skymark может достичь куда большей точности, чем это возможно с «медленными» звездами.
Skymark использует базу данных видимых спутников Земли — как рабочих, так и космического мусора. Создатели утверждают, что точность системы — 15 метров, что близко к результатам GPS.
Порой точность может быть даже выше, но она зависит от того, сколько спутников видны одновременно и какого они размера, подчеркивает Бенджамин Лейн из компании Draper.
Один из недостатков Skymark — она работает при ясном небе. Конечно, использование инфракрасных лучей, более легко проходящих через облака и туман, помогает, но не слишком. В некоторых регионах северного и южного полушарий, где довольно обычна густая облачность, система не столь полезна.
В некоторых регионах северного и южного полушарий, где довольно обычна густая облачность, система не столь полезна.
Автор фото, Getty Images/NASA
Подпись к фото,Отслеживание быстро движущихся вокруг Земли объектов помогает повысить точность навигации по звездам
Возможно, более близка к началу эффективного использования инерциальная навигация, которая применяет акселерометры и гироскопические устройства для определения точной скорости и направления движения и расчета позиции.
Некоторые базовые версии этой системы уже используются. «Когда ваш автомобиль скрывается в тоннеле и вы теряете сигнал GPS, именно инерциальная навигация продолжает вести вас», — говорит Карри.
Проблема с этой навигацией состоит в том, что у нее есть «занос» — рассчитываемая позиция становится все менее точной по мере того, как накапливаются ошибки, поэтому инерциальный навигатор у вас в машине полезен только на время коротких потерь сигнала GPS.
Проблему заноса помогут победить квантовые датчики, которые в тысячи раз чувствительнее, чем ныне существующие устройства.
Французская компания iXBlue применяет их для создания устройства, которое способно будет соперничать по точности с GPS, а ученые из Имперского колледжа Лондона в сотрудничестве со специалистами по лазерам из M Squared в 2018 году показали прототип переносного квантового акселерометра.
Такие квантовые датчики пока существуют только в лабораториях, и должны пройти годы, прежде чем они превратятся в завершенный продукт.
А вот оптическую систему навигации, которая с помощью видеокамер использует ориентиры на местности (например, здания или транспортные развязки), вполне могут ввести в действие уже скоро. Первая ее версия, Digital Scene Matching (корреляция радиолокационного отображения местности с эталонной картографической программой), была разработана для управляемых (крылатых) ракет.
ImageNav, созданная компанией Scientific Systems для ВВС США, — современная система оптической навигации для самолетов. Для определения позиции она обращается к базе данных местности и сравнивает ее с поступающей с видеокамер информацией. ImageNav с успехом испытали на разных самолетах, но она вполне может быть пригодна, например, для беспилотных автомобилей.
Для определения позиции она обращается к базе данных местности и сравнивает ее с поступающей с видеокамер информацией. ImageNav с успехом испытали на разных самолетах, но она вполне может быть пригодна, например, для беспилотных автомобилей.
Шведская компания Everdrone недавно осуществила первую доставку дроном без применения GPS. Их система использует комбинацию оптической навигации (измеряя скорость по тому, как быстро меняется пейзаж на земле) и идентификации объектов на местности, пролагая маршрут от точки до точки с точностью GPS.
Конечно, этот метод полагается на полную и точную базу изображений местности, что требует большого объема памяти устройства и частых обновлений.
Автор фото, Getty Images
Подпись к фото,Инерциальная навигация берет на себя заботу о вашем маршруте, когда сигнал GPS теряется в тоннеле
В Великобритании разрабатывается программа Национального центра времени — первая в мире национальная служба, которая предназначена для подстраховки системы GPS в деле синхронизации времени.
Когда в 2025 году ее введут в строй, она будет использовать множество высокоточных атомных часов, расположенных в охраняемых местах по всей Британии, обеспечивая сигналы точного времени по кабельной сети и радио.
Идея состоит в том, что если спутниковый сигнал прервется, то дублирующая система не будет иметь какого-то единого и потому уязвимого центра, который можно вывести из строя либо случайно, либо из-за технической неполадки, либо с помощью кибератаки.
По большому счету, ни одна отдельная система не в состоянии заменить такую мощную навигационную систему, как GPS, и мы, скорее всего, будем использовать разные альтернативные решения для разных случаев — для судов, самолетов, автомобилей…
Министерство транспорта США сейчас объявило конкурс на лучший запасной вариант для GPS. Но весь вопрос в том, сможет ли такая альтернатива начать работать достаточно быстро.
«Мы знаем, что проблема существует, но [к ее решению] продвигаемся черепашьим шагом», — отмечает Карри.
Мы становимся все более зависимы от точной навигации. Беспилотные автомобили, доставка с помощью дронов, летающие такси, как ожидается, станут привычной частью земного и небесного пейзажа уже в ближайшем десятилетии. Все они будут полагаться на GPS.
Как подчеркивает Карри, один человек с мощной глушилкой спутникового сигнала может вывести из строя систему GPS на территории размером с Лондон, если применит ее с правильного места.
Пока не разработаны адекватные резервные системы, остановить жизнь в целом мегаполисе можно будет буквально по щелчку.
Прочитать оригинал этой статьи на английском языке можно на сайте BBC Future.
ООО «Альянс-ЮГ»: системы мониторинга транспорта ГЛОНАСС\GPS
УСЛУГИ ПО УСТАНОВКЕ СИСТЕМ СПУТНИКОВОГО МОНИТОРИНГА И КОНТРОЛЯ ЗА АВТОМОБИЛЯМИ – ГК «АЛЬЯНСЮГ»
Начиная с 2008 года, ГК «АльянсЮг» оказывает комплекс инновационных услуг. Наш сервис пользуется стабильным спросом со стороны корпоративных клиентов. В их числе – как крупные организации федерального уровня, так и большое количество компаний Краснодарского края. Наш сервис представляет собой практическую реализацию современных технических разработок.
В их числе – как крупные организации федерального уровня, так и большое количество компаний Краснодарского края. Наш сервис представляет собой практическую реализацию современных технических разработок.
ИСПОЛЬЗОВАНИЕ НОВЕЙШИХ ТЕХНОЛОГИЙ
В частности, одним из приоритетных направлений деятельности ГК «АльянсЮг» является спутниковый GPS и ГЛОНАСС мониторинг транспорта. Это способствует тому, что наши корпоративные заказчики получают возможность успешно решать многие вопросы. В первую очередь, существенно улучшается функция контроля, а также дистанционного управления транспортом.
Как показывает практика, система спутникового ГЛОНАСС мониторинга за автомобилем пользуется значительной популярностью. Она дает клиентам нашей компании возможность значительного уменьшения расходов. Использование такой системы контроляпозволяет существенно увеличить эффективность работы грузового транспорта любой организации. Для этого необходимо оборудовать автотранспортные средства соответствующей аппаратурой.
Такие приборы относятся к наиболее современному виду инструментов и способны обеспечить надежный контроль автотранспортной техники каждой организации-клиента. Кроме того, вопросы безопасности грузовых перевозок автомобильным транспортом тоже решаются успешно. Причиной этому является наличие специальных опций, которыми обладают такие приборы.
ВЫСОКАЯ ЭФФЕКТИВНОСТЬ И УНИВЕРСАЛЬНОСТЬ ПРИМЕНЕНИЯ ОБОРУДОВАНИЯ
Каждая система GPS мониторинга за автомобилем функционирует максимально эффективно. При этом общая схема довольно проста для использования всеми клиентами, независимо от уровня их технических знаний. Для успешного ее применения достаточно оборудовать автотранспортное средство специальным контроллером. Такое устройство способно точно определять географические координаты текущего местонахождения автомашины.
Подобный жучок для автомобиля использует современные возможности спутников ГЛОНАСС или GPS. Кроме того, такой прибор способен считывать необходимую информацию с различных системных датчиков, имеющихся в каждом автотранспортном средстве. После этого происходит передача данных на сервер мониторинга. Это позволяет диспетчеру в любой момент времени точно определить местоположение нужного автомобиля.
После этого происходит передача данных на сервер мониторинга. Это позволяет диспетчеру в любой момент времени точно определить местоположение нужного автомобиля.
ПРЕИМУЩЕСТВА СИСТЕМЫ СПУТНИКОВОГО МОНИТОРИНГА
Каждая спутниковая охранная система, установленная специалистами ГК «АльянсЮг», обеспечивает клиентам решение целого ряда поставленных задач. Среди них можно выделить следующие возможности:
- Создание условий для максимальной эффективности работы автомобильного транспорта. В частности, обеспечивается регулярный контроль расхода топлива, что способствует значительному сокращению общих затрат организации-клиента;
- улучшение качества осуществляемых транспортных услуг. На практике, это проявляется в точном соблюдении необходимого графика движения всех автотранспортных средств, а также в следовании установленным правилам выполняемых грузоперевозок.
Кроме того, любая современная охранная система для автомобиля, настройку и сервисное обслуживание которой успешно осуществляют опытные сотрудники ГК «АльянсЮг», позволяет существенно увеличить уровень безопасности перевозок. В частности, происходит точное соблюдение водителями скоростного режима. Одновременно обеспечивается комплексное решение вопросов безопасности – как водителя и перевозимого груза, так и самого автотранспортного средства.
В частности, происходит точное соблюдение водителями скоростного режима. Одновременно обеспечивается комплексное решение вопросов безопасности – как водителя и перевозимого груза, так и самого автотранспортного средства.
ВЫСОКИЙ УРОВЕНЬ ТЕХНИЧЕСКИХ ВОЗМОЖНОСТЕЙ
Благодаря использованию такого современного технического устройства, как GPS жучок дляавтомобиля – оперативно происходит получение диспетчером полной информации о маршруте движения каждого транспортного средства. Это способствует существенному сокращению холостого пробега автомобильного транспорта, а также рациональной загрузке всех водителей организации-клиента.
Каждый установленный в машине GPS-трекер дает возможность отслеживать точное местонахождение – как водителей, так и автомобилей. Осуществляемый высококвалифицированными сотрудниками ГК «АльянсЮг» сервис позволяет клиентам полностью контролировать перевозки грузов, которые выполняют их водители на служебном автотранспорте.
Данный фактор способствует предотвращению каких-либо нарушений и увеличивает эффективность транспортной деятельности клиентов.![]() Каждая охранная сигнализация, монтаж и настройку которой производят опытные специалисты нашей компании, является составной частью системы транспортного мониторинга.
Каждая охранная сигнализация, монтаж и настройку которой производят опытные специалисты нашей компании, является составной частью системы транспортного мониторинга.
Глонасс / GPS мониторинг транспорта, установка и обслуживание
Глонасс / GPS мониторинг транспорта от компании Глобал-Карт это:
- Современное решение спутникового контроля на базе сразу двух передовых спутниковых навигационных систем GPS и Глонасс;
- Собственная разработка облачного веб-интерфейса, ориентированного на нужды клиентов! Нет необходимости устанавливать дополнительную программу на свой компьютер, все операции доступны с любого компьютера и мобильного устройства при наличии доступа к интернету;
- Удобный интерфейс контроля транспортных средств и топлива в режиме реального времени, отслеживание маршрутов и местоположений;
- Накопленный опыт в установке и настройке оборудования;
- Высококачественное обслуживание клиентов;
- Многофункциональный личный кабинет с возможностью интегрирования отчетов по топливным картам;
- Система оповещений;
- Надёжное оборудование! Мы дорожим своей репутацией, поэтому для мониторинга транспорта устанавливаем только надежные трекеры от ведущих производителей.
- Возможность пользования системой управления автопарком, включающей выставление маршрутных и путевых листов, контроль расхода топлива, контроль топливных карт и списков водителей и др.
- Аналитические выкладки по данным пробега, расхода топлива, маршрутам, присутствие на АЗС на момент заправки по топливным картам, соответствие отпущенного топлива и попавшего в бак и др.

GPS — Глонасс мониторинг транспорта широко применяется автотранспортными предприятиями в целях контроля отклонения от маршрутов, соблюдения скоростных режимов, краж топлива. Он подходит как для грузовиков, тракторов, автобусов, так и для служб доставки, такси, а также для ж/д транспорта.
Как показывает практика, после внедрения на предприятии программы спутникового мониторинга происходит снижение следующих показателей:
- Отклонения от маршрутов в личных целях водителя;
- Эксплуатация транспорта в нерабочее время;
- Сокращение расхода топлива в среднем на 10-25%;
- Штрафы ГИБДД на юридическое лицо;
- Время доставки груза.

Особенности:
Спутниковое оборудование устанавливается на транспортное средство скрытно, чтобы водители не имели прямого доступа к антеннам и другим частям системы.
Зачем работать только со спутниками Глонасс или только с оборудованием GPS?
Совмещение с двумя спутниковыми навигационными системами даёт более точные координаты в каждой точке. Там где нет приема спутников GPS, данные передаются при помощи системы Глонасс, и наоборот.
Максимальный контроль за топливом достигается благодаря интеграции с нашим сервисом карта Магистраль Карт.
Мы обучаем Ваш персонал работе с интерфейсом мониторинга транспорта, производим техническую и информационную поддержку всё время сотрудничества!
Современный спутниковый мониторинг транспорта от Глобал-Карт включает в себя индивидуальный подбор, установку и обслуживание оборудования высокого качества, и выгодное ценовое предложение.
По индивидуальному запросу транспорт может быть оборудован дополнительными приборами:
- Датчики температуры
- Связь с водителем
- Тревожная кнопка
- Датчики уровня топлива
- Датчик нагрузки на ось
- Датчик сцепки и др.

Вы можете заказать расчет стоимости оборудования и установки по электронной почте или позвонив к нам в офис.
Путин поддержал объединение систем «ЭРА-ГЛОНАСС», «Безопасный город» и «Система-112» — Экономика и бизнес
МОСКВА, 24 апреля. /ТАСС/. Президент РФ Владимир Путин в ходе рабочей встречи с вице-премьером Дмитрием Рогозиным поддержал идею зампреда правительства технически объединить системы «ЭРА-ГЛОНАСС», «Безопасный город» и «Система-112».
«Так и нужно сделать, имея в виду те положительные результаты, которые показывает внедрение ГЛОНАСС в тех сегментах, о которых вы сказали, — при дорожно-транспортных происшествиях. Насколько я вижу из представленных документов, смертность на дорогах сократилась на 32%», — сказал глава государства.
Рассказывая о результатах применения космических технологий для обеспечения безопасности на дорогах, Рогозин отметил, что считает «технически возможным совмещать системы «ЭРА-ГЛОНАСС», «Безопасный город» и «Система-112». «Это будут единые колл-центры, единые возможности перехода «Безопасного города» к «Умному городу». То есть ГЛОНАСС будет внедрен в том числе в этих технологиях», — сказал он.
«Это будут единые колл-центры, единые возможности перехода «Безопасного города» к «Умному городу». То есть ГЛОНАСС будет внедрен в том числе в этих технологиях», — сказал он.
Рогозин напомнил, что в свое время, когда система «ЭРА-ГЛОНАСС» только начала вводиться, был принят закон, согласно которому все машины, которые после определенной даты ввозились в Российскую Федерацию, должны были быть оснащены этой системой, модулем, чипсетом. По его данным, на сегодняшний день «более 600 иностранных бортов у нас летает в рамках наших авиационных компаний».
«Полагаю необходимым сделать то же самое — вводить в требования, чтобы если самолет закупается российской авиационной компанией, он в обязательном порядке должен быть оснащен этим модулем», — предложил вице-премьер, отметив, что для РФ важно это сделать, иначе нет смысла оборудовать ГЛОНАССом наши аэропорты, если воздушные суда по-прежнему используют GPS. Путин предложение поддержал. «Правильно абсолютно», — сказал глава государства.
Что касается автотранспорта, то на сегодняшний момент более 1 млн 800 тыс. автомобилей в Российской Федерации оснащены системой «ЭРА-ГЛОНАСС». «До конца года будет 3,5 млн машин. Принято и обработано 838 тыс. вызовов, — также сообщил Рогозин. — Более чем в 10 тыс. случаев было обеспечено оперативное реагирование, то есть это сотни человеческих жизней. Мы с вами знаем о том, что есть такое понятие «золотой час», чем быстрее будет оказана помощь пострадавшим, тем больше шансов на спасение жизни. Поэтому эта система активно внедряется».
Спутниковый мониторинг транспорта ГЛОНАСС/GPS | Установка систем спутникового слежения
Применение технологий спутникового мониторинга транспорта на основе навигационных систем ГЛОНАСС и GPS на предприятии обеспечивает повышение эффективности транспортной работы за счет автоматизации бизнес-процессов и решения задач управления, анализа и учета.
В нашем портфеле – специализированные навигационно-информационные системы для автоматизации предприятия любой отрасли, с любым размером автопарка, с учетом особенностей отраслевых бизнес-задач. Вы можете подобрать оптимальное решение для диспетчеризации, мониторинга и контроля вашего автопарка в нашем каталоге.
Вы можете подобрать оптимальное решение для диспетчеризации, мониторинга и контроля вашего автопарка в нашем каталоге.
Системы контроля уровня топлива. Подробнее
Преимущества систем мониторинга СпейсТим
Каталог систем мониторинга транспорта
Эффективность внедрения системы ГЛОНАСС / GPS мониторинга транспорта
Показатели эффективности внедрения технологий спутникового мониторинга автотранспорта ГЛОНАСС на предприятии
| |
Воспользуйтесь услугой облачного мониторинга транспорта ST Flagman Web®. Контролируйте свои транспортные средства и осуществляйте контроль за персоналом, мобильными сотрудниками из любой точки земного шара с любого компьютера или смартфона с доступом в Интернет.
Контролируйте свои транспортные средства и осуществляйте контроль за персоналом, мобильными сотрудниками из любой точки земного шара с любого компьютера или смартфона с доступом в Интернет.
Если вы хотите установить бортовое ГЛОНАСС оборудование или тахограф на транспорт, внедрить систему спутникового мониторинга автотранспорта на основе технологий ГЛОНАСС и GPS, подключить услугу «облачного» мониторинга транспорта ST Flagman Web®:
Отзывы о СпейсТим
Спутниковый мониторинг транспорта на основе технологий ГЛОНАСС и GPSСпейсТим разрабатывает и внедряет отраслевые системы мониторинга автотранспорта на основе технологий ГЛОНАСС и GPS с учетом 17-ти летнего опыта работы в навигации. Система мониторинга транспорта на основе ГЛОНАСС и GPS позволяет установить полный контроль за работой водительского состава и транспортных средств, повысить безопасность пассажирских и грузовых перевозок, сократить расходы на топливо, оптимизировать транспортные бизнес-процессы предприятия и многое другое. СпейсТим, один из ведущих российских разработчиков систем спутникового слежения и мониторинга автотранспорта, создает высокоэффективные специализированные ГЛОНАСС и GPS решения под ключ. Отраслевой ГЛОНАСС мониторинг в максимальной степени учитывает специфику бизнеса Заказчика, а также условия эксплуатации транспортных средств и спецтехники. Внедрение систем мониторинга автотранспорта на основе ГЛОНАСС в разы повышает результативность работы предприятий, специализирующихся на пассажирских и грузовых перевозках. На сегодняшний день мониторинг транспорта на основе технологий спутникового слежения становится ключевым драйвером, позволяющим управлять автопарками на качественно новом уровне. | Важно знать: В соответствии с разделом II п.8 Постановления №720 и Приказа №20 транспортные средства категории M, используемые для коммерческих перевозок пассажиров, и категории N, используемые для перевозки опасных грузов, подлежат оснащению аппаратурой спутниковой навигации ГЛОНАСС или ГЛОНАСС / GPS и обязательны к подключению к автоматизированному центру контроля и надзора Ространснадзора (АЦКН). |

Ключевые показатели эффективности систем мониторинга корпоративного транспорта на основе ГЛОНАСС и GPS
- Повышение рентабельности и конкурентоспособности предприятия
- Повышение качества предоставляемых услуг (пассажирские перевозки, доставка грузов, работа спецтехники)
- Оптимизация расходов на содержание автопарка, включая издержки на ГСМ
- Обеспечение безопасности работы водителей и сохранности перевозимых ценных грузов
- Обеспечение безопасности пассажирских перевозок
- Оперативное управление транспортными средствами в связи с изменением дорожной ситуации
Экономическая выгода от внедрения систем мониторинга автотранспорта очевидна. Практика показывает, что уже в течение первых трех месяцев использование ГЛОНАСС и GPS решений обеспечивает сокращение затрат на ремонт подвижного состава на 10%, а расходы на топливо на 25%.
Комплексный подход при внедрении систем мониторинга
и управления автотранспортом
СпейсТим создает как простые, так и сложные комплексированные навигационно-информационные решения, позволяющие закрывать широкий спектр задач автопредприятия.
В продуктовой линейке компании огромный выбор отраслевых ГЛОНАСС решений, специализированных программных продуктов для спутникового слежения мониторинга транспорта:
|

Почему СпейсТим?
Широкий выбор коробочных отраслевых решений, учитывающих бизнес-потребности Клиента
Индивидуальный подход, возможность доработки функциональности системы мониторинга индивидуально под требования Клиента
Инженерный консалтинг
Надежное профессиональное ГЛОНАСС оборудование и системы мониторинга собственной разработки. Сертифицировано. Рекомендовано к установке на любые типы транспортных средств. Соответствует Приказу №285 и др. нормативно-правовым актам и методическим требованиям к бортовому ГЛОНАСС оборудованию, в т. ч. – Постановлению Минтранса России №641, №720; Приказам №20, №36
Уникальная телематическая платформа для построения систем любой сложности и архитектуры. Соответствует Приказу №285
Гибкая ценовая политика
Сокращенные сроки поставки, внедрения и ввода в эксплуатацию спутникового мониторинга «под ключ»
Профессиональная техническая поддержка, единое сервисное обслуживание на территории всей России и СНГ: 120 региональных дилерских центров
Сроки гарантии на оборудование от одного года до 3-х лет
Наличие ведущих специалистов навигационной отрасли, опыт реализации крупнейших инфраструктурных проектов в России на основе ГЛОНАСС, не имеющих аналогов в мире: система мониторинга транспорта «Транснефть», «Газпром», ИТС Москвы, и др.

Развитие современных технологий, таких как спутниковые ГЛОНАСС и GPS, беспроводная передача данных, М2М, цифровая мобильная связь GSM / GPRS ( 2G, 3G, 4G пр.), Wi-Fi, RFID, радиотехнологий, выводит процесс управления и контроля транспорта на качественно новый уровень.
Спутниковая система мониторинга транспорта ГЛОНАСС / GPS позволяет получить в режиме реального времени достоверную информацию о перемещении, местоположении и состоянии транспортных средств. Мониторинг ГЛОНАСС применяется как на уровне отдельного предприятия, так и транспортного комплекса региона в целом.
Системы спутникового мониторинга на основе ГЛОНАСС помогают решать как узкоспециализированные задачи по управлению специальной техникой, т.е. с учетом отрасли предприятия (отраслевые решения), так и типовые. Таким образом, процесс управления и контроля автотранспорта становится автоматизированным (сокращается влияние человеческого фактора), появляется возможность удаленного контроля особо важных грузов, действий водителей, мобильных сотрудников и др. в нужный момент времени в любой точке.
в нужный момент времени в любой точке.
Новые преимущества комбинированных GPS- и ГЛОНАСС-наблюдений для мониторинга высокоширотных ионосферных неоднородностей на примере июньской геомагнитной бури 2015 г. | Земля, планеты и космос
Сравнение измерений GPS и ГЛОНАСС в полярной области
На рисунке 3 представлены два примера измерений GPS и ГЛОНАСС для двух наземных станций PFRR (65,1° с.ш.; 147,4° з.д.) и MAC1 (54,5° ю.ш.). ; 158,9° в.д.), расположенные в полярных областях северного и южного полушарий соответственно.На левых панелях показана геометрия распределения ИПП наблюдений GPS (синие точки) и ГЛОНАСС (красные точки) над этими станциями (черная точка) за сутки 22 июня 2015 г. Хорошо видно, что наблюдения ГЛОНАСС способны охватить более широкая область в соответствующем направлении к полюсу, чем у возможности покрытия GPS. Как мы объяснили выше, это связано с большим наклонением спутниковых орбит ГЛОНАСС (65° против 55° у GPS). Поэтому спутники ГЛОНАСС могут одновременно отслеживаться одним и тем же оперативным приемником ГНСС на гораздо более высоких широтах, чем спутники GPS.На средней и правой панелях рис. 3 показаны значения ROT и ROTI, рассчитанные отдельно по измерениям GPS и ГЛОНАСС. На левой оси этих графиков указан PRN (псевдослучайный шум) — номер спутника. Отмечается усиление активности ионосферных неоднородностей, начавшееся в ~07 UT на обеих полярных станциях ГНСС. Эти увеличения хорошо коррелируют с тремя периодами увеличения индекса АЭ 06–11, 15–17 и 18–21 UT 22 июня 2015 г. (см. рис. 1d). Важно отметить, что поведение значений ROT/ROTI и их амплитуды очень похожи между измерениями GPS и ГЛОНАСС.Другими словами, они затронуты одинаково. Поэтому вклад данных ГЛОНАСС с различной геометрией и пространственным положением может существенно дополнить наблюдения GPS. Таким образом, измерения флуктуаций (ROT/ROTI) от GPS и ГЛОНАСС совместимы и согласуются друг с другом и могут быть объединены в составной результат, такой как карта ROTI.
Поэтому спутники ГЛОНАСС могут одновременно отслеживаться одним и тем же оперативным приемником ГНСС на гораздо более высоких широтах, чем спутники GPS.На средней и правой панелях рис. 3 показаны значения ROT и ROTI, рассчитанные отдельно по измерениям GPS и ГЛОНАСС. На левой оси этих графиков указан PRN (псевдослучайный шум) — номер спутника. Отмечается усиление активности ионосферных неоднородностей, начавшееся в ~07 UT на обеих полярных станциях ГНСС. Эти увеличения хорошо коррелируют с тремя периодами увеличения индекса АЭ 06–11, 15–17 и 18–21 UT 22 июня 2015 г. (см. рис. 1d). Важно отметить, что поведение значений ROT/ROTI и их амплитуды очень похожи между измерениями GPS и ГЛОНАСС.Другими словами, они затронуты одинаково. Поэтому вклад данных ГЛОНАСС с различной геометрией и пространственным положением может существенно дополнить наблюдения GPS. Таким образом, измерения флуктуаций (ROT/ROTI) от GPS и ГЛОНАСС совместимы и согласуются друг с другом и могут быть объединены в составной результат, такой как карта ROTI.
Примеры измерений GPS и ГЛОНАСС для двух наземных станций PFRR (65,1°N; 147,4°W) и MAC1 (54.5°ю.ш.; 158.9°E) в возмущенный день 22 июня 2015 г.: распределение проекций ИПП по одной станции ( левая панель ) с черной точкой , указывающей местоположение станции; производная вариация ROT (, средняя панель, ) и вариация ROTI (, правая панель, ) по всем видимым спутникам. Измерения GPS показаны синим цветом, измерения ГЛОНАСС — красным цветом , а левая ось показывает номер спутника (PRN)
.Двумерные совмещенные карты ROTI GPS и ГЛОНАСС
На рисунках 4 и 5 представлены почасовые карты ROTI, построенные в полярно-географической проекции на северное и южное полушария соответственно для спокойного дня 20 июня 2015 г. и двух возмущенных дней июня 22 и 23, 2015 .На основе комбинированных наблюдений GPS и ГЛОНАСС эти карты ROTI были построены с высоким пространственным разрешением (1° × 1° по географической широте и долготе) и временным интервалом 1 ч. Карта для 00 UT означает, что здесь мы усреднили данные с 00:00 до 00:59 UT. Полный набор почасовых карт ROTI доступен в сопроводительной информации (Дополнительный файл 1: S1, Дополнительный файл 2: S2, Дополнительный файл 3: S3).
Карта для 00 UT означает, что здесь мы усреднили данные с 00:00 до 00:59 UT. Полный набор почасовых карт ROTI доступен в сопроводительной информации (Дополнительный файл 1: S1, Дополнительный файл 2: S2, Дополнительный файл 3: S3).
Двумерные карты ROTI, полученные на основе совместных наблюдений GPS и ГЛОНАСС над северным полушарием для спокойного дня a 20 июня и возмущенных дней b 22 июня и c 23 июня , 2015. В каждой вертикальной строке показаны карты ROTI, построенные с разрешением 1 час, а здесь показанные с интервалом 4 часа. Черная точка показывает местоположение геомагнитного полюса
Рис. 5 Двумерные карты ROTI, полученные на основе комбинированных наблюдений GPS и ГЛОНАСС над южным полушарием для a спокойного дня 20 июня и возмущенных дней b 22 июня и c 23 июня 2015 г. В каждой вертикальной строке показаны карты ROTI, построенные с разрешением 1 час, а здесь с интервалом 4 часа. Черная точка показывает положение геомагнитного полюса. Полный набор двухмерных карт по обоим полушариям с временным интервалом в 1 час доступен в сопроводительных материалах Дополнительный файл 1: S1, Дополнительный файл 2: S2, Дополнительный файл 3: S3 соответственно на 20 июня, 22 июня и июнь. 23 года 2015
Черная точка показывает положение геомагнитного полюса. Полный набор двухмерных карт по обоим полушариям с временным интервалом в 1 час доступен в сопроводительных материалах Дополнительный файл 1: S1, Дополнительный файл 2: S2, Дополнительный файл 3: S3 соответственно на 20 июня, 22 июня и июнь. 23 года 2015
Следует отметить, что североамериканский и европейский секторы имеют существенно лучшее покрытие данными, чем другие регионы северного и южного полушария (см.2а, д), поэтому почасовые карты ROTI показывают наилучший охват данных и более высокое разрешение по этим регионам. В целом средние и высокие широты северного полушария демонстрируют надлежащее покрытие наблюдениями GPS и ГЛОНАСС в широком долготном диапазоне 140°з.д.–50°в.д. Помимо GNSS, нет другого радиоинструмента, способного обеспечить такое покрытие данными с земли.
Эти почасовые карты ROTI демонстрируют динамику ионосферных неоднородностей в географической системе координат. Значения ROTI, отмеченные темно-синим цветом (ROTI ниже 0,2 TECU/мин), представляют очень слабые ионосферные неоднородности или их отсутствие. Значения ROTI, отмеченные оранжевым и красным цветами (ROTI >0.8–1.0 TECU/мин), соответствуют возникновению в этом секторе интенсивных ионосферных неоднородностей. Анализ карт ROTI для спокойного дня 20 июня 2015 г. (рис. 4а, 5а) выявил очень спокойную обстановку над полярными областями в обоих полушариях с довольно слабыми неоднородностями, возникающими в окрестностях геомагнитных полюсов.
Значения ROTI, отмеченные темно-синим цветом (ROTI ниже 0,2 TECU/мин), представляют очень слабые ионосферные неоднородности или их отсутствие. Значения ROTI, отмеченные оранжевым и красным цветами (ROTI >0.8–1.0 TECU/мин), соответствуют возникновению в этом секторе интенсивных ионосферных неоднородностей. Анализ карт ROTI для спокойного дня 20 июня 2015 г. (рис. 4а, 5а) выявил очень спокойную обстановку над полярными областями в обоих полушариях с довольно слабыми неоднородностями, возникающими в окрестностях геомагнитных полюсов.
Первые заметные изменения в картине распределения неоднородностей появились после 07–08 UT 22 июня 2015 г., инициированные вторым приходом КВМ и первым усилением авроральной активности (см. рис. 1). Наиболее интенсивные неоднородности в обоих полушариях наблюдались после 16 UT 22 июня. Было обнаружено, что очень высокие значения ROTI (> 0,8–1 TECU / мин) образуют овальную структуру вокруг северного геомагнитного полюса. Далее овал неоднородности, полученный по данным ГНСС, в течение нескольких часов расширялся к экватору, а его экваториальная кромка обнаруживалась в североамериканском секторе на ~45°N–50°N географической широты в течение более 2–3 ч. Самые высокие значения интенсивности ROTI в этой овальной структуре наблюдались в основном над Северной Европой. Также следует подчеркнуть, что интенсивные ионосферные неоднородности наблюдались над Южной Европой на ~25°N–40°N географической широты во время главной фазы бури в 20-04 UT (рис. 4; Доп. файл 2: S2, Доп. файл 3: С3). Эти неоднородности были связаны с появлением плазменных выкусов и экваториальных пузырей плазмы в послезакатном секторе (20-04 UT) над низкими широтами Западной Африки после мгновенного проникновения электрических полей в 18-20 UT 22 июня 2015 г. (для подробнее см. Черняк и Захаренкова 2016b).
Самые высокие значения интенсивности ROTI в этой овальной структуре наблюдались в основном над Северной Европой. Также следует подчеркнуть, что интенсивные ионосферные неоднородности наблюдались над Южной Европой на ~25°N–40°N географической широты во время главной фазы бури в 20-04 UT (рис. 4; Доп. файл 2: S2, Доп. файл 3: С3). Эти неоднородности были связаны с появлением плазменных выкусов и экваториальных пузырей плазмы в послезакатном секторе (20-04 UT) над низкими широтами Западной Африки после мгновенного проникновения электрических полей в 18-20 UT 22 июня 2015 г. (для подробнее см. Черняк и Захаренкова 2016b).
Ионосферные неоднородности, возникшие во время геомагнитной бури в июне 2015 г. и зафиксированные совместными наблюдениями GPS и ГЛОНАСС, влияют на работу навигационной системы. В отчете об анализе производительности системы WAAS указано, что в течение 22–23 июня наблюдалось снижение характеристик курсового маяка с вертикальным наведением (LPV) и характеристик курсового радиомаяка с вертикальным наведением до высоты принятия решения 200 футов (LPV200), обеспечиваемой WAAS в континентальной части США. (CONUS), Аляске и Канаде (Wanner 2015).В этих регионах наблюдались сильные ионосферные неоднородности, связанные с высыпаниями авроральных частиц, более подробно описанные в следующих подразделах. Более того, очень интенсивные неровности приводят к ухудшению работы Европейской геостационарной навигационной службы (EGNOS). Очень интересно отметить, что влияние появления ионосферных неоднородностей на работу ГНСС в европейском секторе наблюдалось не только в высоких широтах (неоднородности, связанные с высыпанием частиц и образованием ионосферных пятен), но и в Южной Европе и Средиземноморском регионе. (неоднородности, связанные с обеднением плазмы во время бури экваториального происхождения, т.э., развитие плазменных пузырей) (Черняк, Захаренкова, 2016б).
(CONUS), Аляске и Канаде (Wanner 2015).В этих регионах наблюдались сильные ионосферные неоднородности, связанные с высыпаниями авроральных частиц, более подробно описанные в следующих подразделах. Более того, очень интенсивные неровности приводят к ухудшению работы Европейской геостационарной навигационной службы (EGNOS). Очень интересно отметить, что влияние появления ионосферных неоднородностей на работу ГНСС в европейском секторе наблюдалось не только в высоких широтах (неоднородности, связанные с высыпанием частиц и образованием ионосферных пятен), но и в Южной Европе и Средиземноморском регионе. (неоднородности, связанные с обеднением плазмы во время бури экваториального происхождения, т.э., развитие плазменных пузырей) (Черняк, Захаренкова, 2016б).
В высоких широтах генерация и эволюция ионосферных неоднородностей были связаны с высыпанием авроральных частиц после прихода КВМ и дальнейшим развитием главной фазы этой геомагнитной бури.
На рисунке 5 представлена эволюция ионосферных неоднородностей над южным полушарием. Здесь также можно оценить различия в проявлении, интенсивности и расположении ионосферных неоднородностей.Мы отмечаем появление высоких значений ROTI вблизи геомагнитного полюса, что может быть связано с ионосферными неоднородностями, генерируемыми высыпанием частиц на дневной пик (например, Келли и др., 1982; Вебер и др., 1984). Ионосферные неоднородности такого происхождения обычно развиваются даже в спокойных геомагнитных условиях (см. рис. 5а).
Здесь также можно оценить различия в проявлении, интенсивности и расположении ионосферных неоднородностей.Мы отмечаем появление высоких значений ROTI вблизи геомагнитного полюса, что может быть связано с ионосферными неоднородностями, генерируемыми высыпанием частиц на дневной пик (например, Келли и др., 1982; Вебер и др., 1984). Ионосферные неоднородности такого происхождения обычно развиваются даже в спокойных геомагнитных условиях (см. рис. 5а).
Видны выраженные усиления и расширение к экватору зоны неоднородности. Следует отметить, что из-за существенно меньшего охвата данными ГНСС южного полушария (из-за преобладания акватории океана) такие эффекты наблюдались в ограниченном диапазоне долгот 30°–170° в.д. (в основном над станциями ГНСС в Антарктиде). , а также в новозеландской и австралийской сетях и островах в Тихом океане).Такое ограниченное покрытие в южном полушарии не позволяет отобразить всю картину поведения ионосферных неоднородностей с помощью карт ROTI с разрешением 1 ч так подробно, как в северном полушарии. Несмотря на это ограничение, 1-часовые карты ROTI четко показали эволюцию зоны ионосферных неоднородностей во времени. На рисунке 5б показано возникновение узкой овальной или кольцеобразной структуры вокруг геомагнитного полюса в 16 UT, а затем эта зона расширилась и охватила весь антарктический континент (20 UT).Далее зона неоднородностей расширилась к экватору и достигла Новой Зеландии и Южной Австралии с гораздо меньшими значениями ROTI вблизи южного магнитного полюса (рис. 5в, 04 UT). В целом эволюция овала неровностей довольно похожа на эволюцию, наблюдаемую в северном полушарии. Однако мы должны учитывать сезонные (зима-лето) различия между полушариями. Laundal and Østgaard (2009) объясняют эту асимметрию межполушарными токами, связанными с сезонами: ожидается, что разница в проводимости ионосферы приведет к различной интенсивности полярных сияний в двух полушариях, а также когда ММП имеет значительные значения Bx и By компонент.Все эти условия наблюдались во время геомагнитной бури 22–23 июня.
Несмотря на это ограничение, 1-часовые карты ROTI четко показали эволюцию зоны ионосферных неоднородностей во времени. На рисунке 5б показано возникновение узкой овальной или кольцеобразной структуры вокруг геомагнитного полюса в 16 UT, а затем эта зона расширилась и охватила весь антарктический континент (20 UT).Далее зона неоднородностей расширилась к экватору и достигла Новой Зеландии и Южной Австралии с гораздо меньшими значениями ROTI вблизи южного магнитного полюса (рис. 5в, 04 UT). В целом эволюция овала неровностей довольно похожа на эволюцию, наблюдаемую в северном полушарии. Однако мы должны учитывать сезонные (зима-лето) различия между полушариями. Laundal and Østgaard (2009) объясняют эту асимметрию межполушарными токами, связанными с сезонами: ожидается, что разница в проводимости ионосферы приведет к различной интенсивности полярных сияний в двух полушариях, а также когда ММП имеет значительные значения Bx и By компонент.Все эти условия наблюдались во время геомагнитной бури 22–23 июня.
Меридиональные срезы объединенных карт GPS и ГЛОНАСС ROTI
Для сравнения временной эволюции штормовых ионосферных неоднородностей во время геомагнитной бури 22–23 июня 2015 г. были выбраны наиболее репрезентативные и охваченные данными долготные секторы в обоих полушариях и проанализированы меридиональные срезы карт GPS и ГЛОНАСС ROTI. Чтобы увеличить временное разрешение, мы рассчитали карты ROTI с частотой дискретизации 15 минут вместо 1 часа, как представлено в разделе «Двумерные комбинированные карты ROTI GPS и ГЛОНАСС».На рисунке 6 показано сравнение индексов SYM-H (1-минутное разрешение Dst) и аврорального электроджета (AE) с меридиональными срезами возмущений ROTI, оцененными по следующим долготам: 85°з.д. в Северной Америке, 20°в.д. в Европе. , 70° з. д. в Южной Америке и 150° в. ° вокруг выбранной географической долготы и нанесены на график в зависимости от географической широты и времени.Мы рассматриваем диапазон географических широт от 30° до 90° в обоих полушариях. Левая вертикальная ось на рис. 6b–e показывает географические широты, а правая ось показывает соответствующие скорректированные геомагнитные широты. Необходимо отметить, что из-за разницы между геомагнитным и географическим полюсами меридиональные срезы на рис. 6б, д пересекли широту геомагнитного полюса.
Левая вертикальная ось на рис. 6b–e показывает географические широты, а правая ось показывает соответствующие скорректированные геомагнитные широты. Необходимо отметить, что из-за разницы между геомагнитным и географическим полюсами меридиональные срезы на рис. 6б, д пересекли широту геомагнитного полюса.
Сравнение a индексов SYM-H и AE с 1-минутным разрешением и возмущений ROTI с 15-минутным разрешением в зависимости от географической широты и времени, оцененных вдоль b 85W в Северной Америке, c 20E в Европе, d 70W в Южной Америке и e 150E в австралийском секторе в течение 20 и 22–23 июня 2015 г.На графиках левая вертикальная ось для b – e показаны географические широты, правая ось — соответствующие скорректированные геомагнитные широты
Для спокойного дня 20 июня 2015 г. меридиональные срезы карт ROTI северного полушария, представленные на рис. 6б–д, выявили наличие ионосферных неоднородностей на высоких широтах только в пределах ) в американском и австралийском секторах, вероятно, вызванные выпадением мягких частиц.Первый заметный пик в распределении неоднородностей по ROTI был выделен после ~06 UT 22 июня 2015 г. во всех рассматриваемых широтных секторах. Этот период соответствовал второму приходу КВМ в 05:45 UT, быстрым изменениям индекса SYM-H и первому усилению авроральной активности, представленному увеличением индекса АЕ на ~1300 нТл (см. рис. 6а). Следующий пик ионосферных неоднородностей в высоких широтах наблюдался в 15-17 UT. Эти процессы были инициированы поворотом Bz ММП на юг и дальнейшим усилением авроральной активности, когда AE возросла до ~1340 нТл, а SYM-H упала до -70 нТл.В этот период ионосферные неоднородности также регистрировались одновременно в экваториальном направлении как 70° MLAT в Северной Америке и 65° MLAT в Европе (рис. 6б, в).
6б–д, выявили наличие ионосферных неоднородностей на высоких широтах только в пределах ) в американском и австралийском секторах, вероятно, вызванные выпадением мягких частиц.Первый заметный пик в распределении неоднородностей по ROTI был выделен после ~06 UT 22 июня 2015 г. во всех рассматриваемых широтных секторах. Этот период соответствовал второму приходу КВМ в 05:45 UT, быстрым изменениям индекса SYM-H и первому усилению авроральной активности, представленному увеличением индекса АЕ на ~1300 нТл (см. рис. 6а). Следующий пик ионосферных неоднородностей в высоких широтах наблюдался в 15-17 UT. Эти процессы были инициированы поворотом Bz ММП на юг и дальнейшим усилением авроральной активности, когда AE возросла до ~1340 нТл, а SYM-H упала до -70 нТл.В этот период ионосферные неоднородности также регистрировались одновременно в экваториальном направлении как 70° MLAT в Северной Америке и 65° MLAT в Европе (рис. 6б, в).
Наиболее интенсивные неоднородности в высоких и средних широтах обнаружены в 18-22 UT 22 июня, что связано с новым периодом повышенной авроральной активности с двумя пиками АЕ-индекса ~2180 и ~ 2700 нТл, наблюдаемые в 18:49 и 20:10 UT соответственно. В течение этого периода SYM-H увеличился до +88 нТл и быстро упал до значения -139 нТл с резкой скоростью изменения около -130 нТл/ч.В результате в этот период высокоширотные аномалии были обнаружены вплоть до экватора до 54° MLAT в Северной Америке и 45° MLAT в Европе. Было обнаружено, что в южном полушарии их сигнатуры простираются к экватору до −55° MLAT в Южной Америке и −50° MLAT в австралийском секторе (рис. 6d, e). Кроме того, мы обнаружили, что изображения прибора SSUSI на борту четырех спутников DMSP (доступны по адресу http://ssusi.jhuapl.edu/data/edr-aur-anim//years/2015/173/EDR-AUR_LBHS_2015173.gif и размещены как Дополнительный файл 4: S4) выявил усиление авроральной активности 22 июня 2015 г. и расширение зоны полярных сияний к экватору до 50° MLAT в течение 18-22 UT.
В течение этого периода SYM-H увеличился до +88 нТл и быстро упал до значения -139 нТл с резкой скоростью изменения около -130 нТл/ч.В результате в этот период высокоширотные аномалии были обнаружены вплоть до экватора до 54° MLAT в Северной Америке и 45° MLAT в Европе. Было обнаружено, что в южном полушарии их сигнатуры простираются к экватору до −55° MLAT в Южной Америке и −50° MLAT в австралийском секторе (рис. 6d, e). Кроме того, мы обнаружили, что изображения прибора SSUSI на борту четырех спутников DMSP (доступны по адресу http://ssusi.jhuapl.edu/data/edr-aur-anim//years/2015/173/EDR-AUR_LBHS_2015173.gif и размещены как Дополнительный файл 4: S4) выявил усиление авроральной активности 22 июня 2015 г. и расширение зоны полярных сияний к экватору до 50° MLAT в течение 18-22 UT.
В ходе развития второй главной фазы (01:50–05:40 UT 23 июня) интенсивные ионосферные неоднородности регистрировались непрерывно в течение более длительного периода (4–5 ч) и охватывали широтный диапазон от полярной области до 55° MLAT в обоих секторах северного полушария (рис. 6б, в) и до -50° MLAT в южном полушарии (рис. 6г, д). Таким образом, сигнатуры ионосферных неоднородностей, зарегистрированные по сигналам GPS и ГЛОНАСС и проанализированные с использованием метода меридиональных срезов, обнаруживают сильную связь их интенсивности и пространственного расширения в экваториальном направлении с усилением авроральной активности, в частности представленной АЭ и индексы SYM-H.Такой анализ во временно-широтной области позволяет оценить принципиальные зависимости возникновения ионосферных неоднородностей и их дальнейшего развития и эволюции от факторов космической погоды. Дальнейшие исследования на основе этих подходов позволят формализовать эти зависимости в виде эмпирической модели ионосферных неоднородностей.
6б, в) и до -50° MLAT в южном полушарии (рис. 6г, д). Таким образом, сигнатуры ионосферных неоднородностей, зарегистрированные по сигналам GPS и ГЛОНАСС и проанализированные с использованием метода меридиональных срезов, обнаруживают сильную связь их интенсивности и пространственного расширения в экваториальном направлении с усилением авроральной активности, в частности представленной АЭ и индексы SYM-H.Такой анализ во временно-широтной области позволяет оценить принципиальные зависимости возникновения ионосферных неоднородностей и их дальнейшего развития и эволюции от факторов космической погоды. Дальнейшие исследования на основе этих подходов позволят формализовать эти зависимости в виде эмпирической модели ионосферных неоднородностей.
Подводя итог, можно сказать, что, несмотря на беспрецедентно большое количество станций, развернутых по всему миру за последние 5–10 лет, высокоширотные районы (выше 60° MLAT) в обоих полушариях демонстрируют довольно слабое покрытие наземными системами GPS и ГЛОНАСС. наблюдений по сравнению со средними широтами.С другой стороны, на сегодняшний день сегмент наземной ГНСС является единственным источником данных, способным обеспечить наземные наблюдения с нескольких пунктов с наилучшим глобальным охватом.
наблюдений по сравнению со средними широтами.С другой стороны, на сегодняшний день сегмент наземной ГНСС является единственным источником данных, способным обеспечить наземные наблюдения с нескольких пунктов с наилучшим глобальным охватом.
В этой статье мы расширяем использование карт ROTI для анализа распределения ионосферных неоднородностей. Показано, что меридиональные срезы карт ROTI можно эффективно использовать для изучения возникновения и временной эволюции ионосферных неоднородностей над отдельными географическими регионами в спокойные и особенно геомагнитно возмущенные периоды.Меридиональные срезы географических секторов, характеризующиеся высокой плотностью измерений GPS и ГЛОНАСС, могут отображать пространственно-временную динамику интенсивных неоднородностей плотности ионосферной плазмы с высоким разрешением и использоваться для детальных исследований факторов космической погоды на процессы генерация ионосферных неоднородностей, их эволюция и время жизни.
Подчеркнем, что совмещение сигналов GPS и ГЛОНАСС позволяет значительно увеличить количество трансионосферных измерительных каналов в глобальном масштабе. В результате это позволяет повысить производительность мониторинга ионосферных неоднородностей как в районах с разреженным, так и с плотным постоянным покрытием сети ГНСС. В случае разреженных сетей (например, Северная Канада и Россия, район Антарктиды и прибрежная зона в полярных районах) присоединение измерений на основе ГЛОНАСС, благодаря иной конфигурации созвездия по сравнению с GPS, позволяет заметно расширить области охваченные измерениями ГНСС и существенно увеличить количество доступных точек проникновения в ионосферу.Особые преимущества данных ГЛОНАСС в высоких широтах могут заключаться в более раннем или лучшем обнаружении ионосферных возмущений, связанных с физическими процессами в авроральной области и полярной шапке, в частности, за счет комбинации с другими инструментами, такими как совмещенные магнитометры, камеры всего неба и когерентные датчики. радары. Как видно на рис. 4, районы высоких и средних широт в американском и европейском секторах хорошо охвачены комбинированными измерениями GPS и ГЛОНАСС без каких-либо существенных пробелов «отсутствия данных».
В результате это позволяет повысить производительность мониторинга ионосферных неоднородностей как в районах с разреженным, так и с плотным постоянным покрытием сети ГНСС. В случае разреженных сетей (например, Северная Канада и Россия, район Антарктиды и прибрежная зона в полярных районах) присоединение измерений на основе ГЛОНАСС, благодаря иной конфигурации созвездия по сравнению с GPS, позволяет заметно расширить области охваченные измерениями ГНСС и существенно увеличить количество доступных точек проникновения в ионосферу.Особые преимущества данных ГЛОНАСС в высоких широтах могут заключаться в более раннем или лучшем обнаружении ионосферных возмущений, связанных с физическими процессами в авроральной области и полярной шапке, в частности, за счет комбинации с другими инструментами, такими как совмещенные магнитометры, камеры всего неба и когерентные датчики. радары. Как видно на рис. 4, районы высоких и средних широт в американском и европейском секторах хорошо охвачены комбинированными измерениями GPS и ГЛОНАСС без каких-либо существенных пробелов «отсутствия данных». Для регионов с плотной сетью ГНСС дополнительное использование данных ГЛОНАСС увеличило бы количество доступных измерений в 1,5–2 раза по сравнению с одним лишь GPS — например, для европейского региона мы можем получить ~1 700 000– 1 800 000 ИПС за 1 час. Таким образом, мы потенциально можем построить региональные карты ROTI с беспрецедентно высоким разрешением до 0,5° × 0,5° по географической широте и долготе. Такие подробные карты ROTI уже успешно использовались для обнаружения ионосферных неоднородностей, связанных с признаками истощения плазмы, вызванными штормами, в Европе (Черняк и Захаренкова, 2016b).
Для регионов с плотной сетью ГНСС дополнительное использование данных ГЛОНАСС увеличило бы количество доступных измерений в 1,5–2 раза по сравнению с одним лишь GPS — например, для европейского региона мы можем получить ~1 700 000– 1 800 000 ИПС за 1 час. Таким образом, мы потенциально можем построить региональные карты ROTI с беспрецедентно высоким разрешением до 0,5° × 0,5° по географической широте и долготе. Такие подробные карты ROTI уже успешно использовались для обнаружения ионосферных неоднородностей, связанных с признаками истощения плазмы, вызванными штормами, в Европе (Черняк и Захаренкова, 2016b).
Преимущества комбинированного GPS/ГЛОНАСС с недорогими MEMS IMU для автомобильной городской навигации
Датчики (Базель). 2012 г.; 12(4): 5134–5158.
Антонио Ангризано
1 Кафедра прикладных наук, Неаполитанский университет Парфенопы, Centro Direzionale di Napoli, Isola C4, 80143 Неаполь, Италия Университет Калгари, 2500 University Drive NW, Калгари, AB T2N 1N4, Канада; Электронная почта: ак. [email protected]
[email protected]
Giovanni Pugliano
3 Технологический факультет Неаполитанского университета Партенопа, Centro Direzionale di Napoli, Isola C4, 80143 Napoli, Италия; Электронная почта: [email protected]
1 Факультет прикладных наук, Неаполитанский университет Партенопа, Centro Direzionale di Napoli, Isola C4, 80143 Неаполь, Италия Инженерное дело, Университет Калгари, 2500 University Drive NW, Калгари, AB T2N 1N4, Канада; Электронная почта: ак[email protected]
Поступила в редакцию 13 февраля 2012 г.; Пересмотрено 21 марта 2012 г.; Принято 16 апреля 2012 г.
Авторские права © 2012 принадлежат авторам; лицензиат MDPI, Базель, Швейцария. Эта статья цитировалась другими статьями в PMC.Abstract
Интеграция глобальных навигационных спутниковых систем (ГНСС) с инерциальными навигационными системами (ИНС) очень активно исследуется в течение многих лет из-за взаимодополняющего характера этих двух систем. В частности, в течение последних нескольких лет исследовалась интеграция с микроэлектромеханическими системами (МЭМС) инерциальных измерительных блоков (ИИС).Фактически, недавние достижения в технологии MEMS сделали возможной разработку нового поколения недорогих инерциальных датчиков, характеризующихся малыми размерами и малым весом, что представляет собой привлекательный вариант для массовых приложений, таких как автомобильная и пешеходная навигация. Однако, несмотря на большой интерес к интеграции GPS с ИНС на основе МЭМС, было проведено мало исследований по распространению этого приложения на обновленную систему ГЛОНАСС. В этом документе рассматриваются преимущества добавления ГЛОНАСС к существующим системам GPS/INS (MEMS) с использованием стратегий слабой и тесной интеграции.Также оцениваются относительные преимущества различных ограничений. Результаты показывают, что при плохой видимости спутника (примерно 50% доступности решения) преимущества ГЛОНАСС проявляются только при использовании алгоритмов тесной интеграции. Для более благоприятных сред слабосвязанная система GPS/ГЛОНАСС/ИНС предлагает производительность, сравнимую с жестко связанной системой GPS/ИНС, но с меньшими сложностью и временем разработки.
В частности, в течение последних нескольких лет исследовалась интеграция с микроэлектромеханическими системами (МЭМС) инерциальных измерительных блоков (ИИС).Фактически, недавние достижения в технологии MEMS сделали возможной разработку нового поколения недорогих инерциальных датчиков, характеризующихся малыми размерами и малым весом, что представляет собой привлекательный вариант для массовых приложений, таких как автомобильная и пешеходная навигация. Однако, несмотря на большой интерес к интеграции GPS с ИНС на основе МЭМС, было проведено мало исследований по распространению этого приложения на обновленную систему ГЛОНАСС. В этом документе рассматриваются преимущества добавления ГЛОНАСС к существующим системам GPS/INS (MEMS) с использованием стратегий слабой и тесной интеграции.Также оцениваются относительные преимущества различных ограничений. Результаты показывают, что при плохой видимости спутника (примерно 50% доступности решения) преимущества ГЛОНАСС проявляются только при использовании алгоритмов тесной интеграции. Для более благоприятных сред слабосвязанная система GPS/ГЛОНАСС/ИНС предлагает производительность, сравнимую с жестко связанной системой GPS/ИНС, но с меньшими сложностью и временем разработки.
Ключевые слова: GPS, ГЛОНАСС, фильтр Калмана, слабосвязанные, сильносвязанные, псевдонаблюдения
1.Введение
Как известно, городская среда является важным местом для глобальных навигационных спутниковых систем (ГНСС). В таких условиях здания блокируют многие сигналы, что снижает доступность спутников и ухудшает геометрию наблюдения, а крайним случаем является недоступность решения. Здания также могут отражать сигналы, вызывая явление многолучевости, которое приводит к наибольшим ошибкам измерения в этих областях. Прошлые исследования по этой проблеме можно в целом классифицировать как направленные на: (а) увеличение количества спутников, как правило, за счет включения дополнительных ГНСС в существующую систему, или (б) интеграцию ГНСС с внешними датчиками, чаще всего с инерциальной навигационной системой (ИНС). ).
).
За некоторыми исключениями, Глобальная система позиционирования США (GPS) была основной GNSS с момента ее создания много лет назад. Российская система ГЛОНАСС использовалась в середине-конце 1990-х годов, прежде чем потерпела неудачу, которая преследовала систему до последних нескольких лет. Тем не менее, преимущества интеграции ГЛОНАСС с GPS были достаточно хорошо задокументированы, и были показаны улучшения в измерениях и доступности решений, точности и надежности позиционирования и разрешении неоднозначности [1–3].В связи с недавним возрождением системы ГЛОНАСС ее снова рассматривают для использования во многих системах (там же).
Интеграция GNSS с INS активно исследуется в течение многих лет из-за взаимодополняющего характера этих двух систем. В сложных условиях GNSS, таких как городские каньоны и под листвой, цель INS — предоставить навигационное решение во время сбоев GPS. Кроме того, интеграция GNSS с инерциальной навигационной системой может обеспечить более надежные и надежные системы, чем любая из отдельных систем по отдельности [4].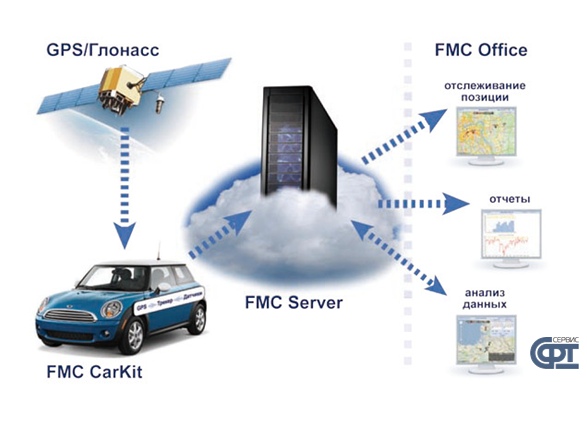 Однако производительность ИНС во многом зависит от качества (и, следовательно, стоимости) используемых инерциальных датчиков, причем более качественные датчики дают наилучшие результаты.
Однако производительность ИНС во многом зависит от качества (и, следовательно, стоимости) используемых инерциальных датчиков, причем более качественные датчики дают наилучшие результаты.
С этой целью использование высокотехнологичных ИНС обычно ограничивается только высокоточными приложениями из-за их цены и размера [5,6]. Тем не менее, недавние достижения в технологии микроэлектромеханических систем (МЭМС) сделали возможной разработку нового поколения недорогих инерциальных датчиков, характеризующихся малыми размерами и легким весом, которые представляют собой привлекательный вариант для коммерческих приложений, таких как пешеходные и автомобильные датчики. навигация.ИНС на основе МЭМС также характеризуются низкой производительностью, особенно при отсутствии данных ГНСС, поэтому их использование в составе комплексной навигационной системы в настоящее время находится на стадии изучения. В последние несколько лет несколько исследователей исследовали интеграцию систем ГНСС с ИНС на основе МЭМС [5–12].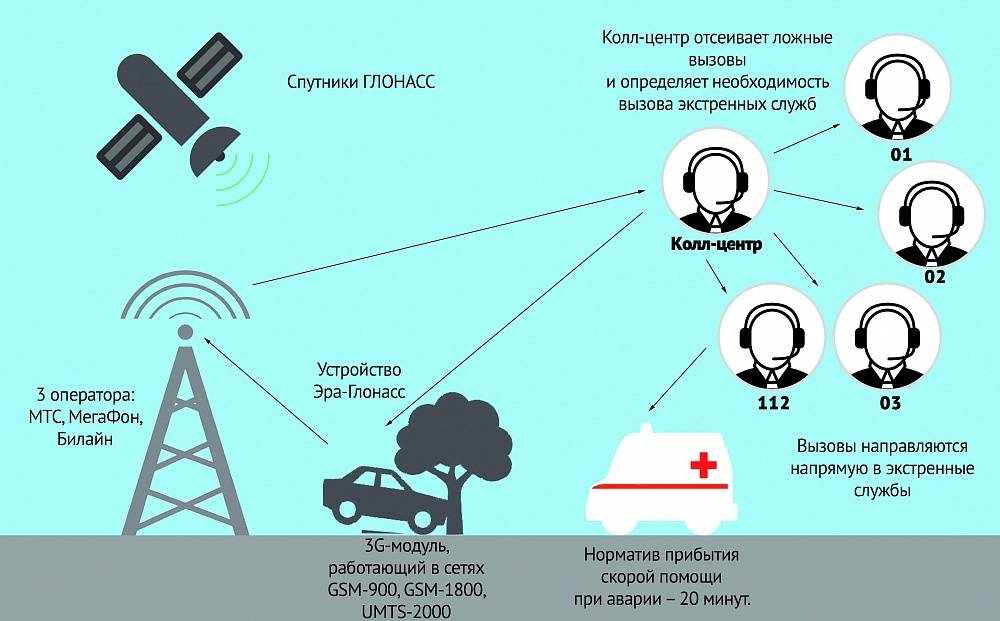 Однако стоит отметить, что все эти исследования были сосредоточены только на GPS для обновления INS.
Однако стоит отметить, что все эти исследования были сосредоточены только на GPS для обновления INS.
Интеграция комбинированной системы GPS/ГЛОНАСС с ИНС уже была опробована несколько лет назад (т.g., Lechner и др. . [13]) или совсем недавно, например, Rinnan et al . [14], но с устройствами IMU высокого класса), следует идее проверить в этой работе производительность GPS/ГЛОНАСС с недорогими инерциальными датчиками.
В частности, для автомобильной навигации ограничения скорости транспортного средства, известные как неголономные ограничения, могут применяться для дальнейшего улучшения характеристик ИНС [6,15–19]. Кроме того, для улучшения характеристик также можно использовать данные о рыскании (азимуте), полученные с помощью ГНСС [11].Наконец, если предположить, что транспортное средство движется по приблизительно ровной дороге, можно также ввести ограничение по высоте.
Основная цель этой статьи — расширить предыдущую работу, чтобы исследовать преимущества, если таковые имеются, от добавления ГЛОНАСС к системам GPS/INS (MEMS), особенно для автомобильных навигационных приложений. В рамках этого документа оценивается производительность алгоритмов слабой и тесной интеграции ( т.е. ., интеграция на уровне позиции и уровне измерения, соответственно).В частности, поскольку слабая связь не может обеспечивать обновления в периоды недостаточной видимости спутника [5], что приводит к снижению производительности по сравнению со случаем тесной интеграции, рассматривается роль добавления данных ГЛОНАСС в различные архитектуры (интересное применение GNSS/INS). интегрирование со слабосвязанной стратегией выполнено в [20]). Аналогичным образом необходимо переоценить роль неголономных ограничений, а также вспомогательной информации, полученной из данных о курсе, полученных с помощью GNSS, и ограничений по высоте, с учетом повышения доступности измерений GNSS.
В рамках этого документа оценивается производительность алгоритмов слабой и тесной интеграции ( т.е. ., интеграция на уровне позиции и уровне измерения, соответственно).В частности, поскольку слабая связь не может обеспечивать обновления в периоды недостаточной видимости спутника [5], что приводит к снижению производительности по сравнению со случаем тесной интеграции, рассматривается роль добавления данных ГЛОНАСС в различные архитектуры (интересное применение GNSS/INS). интегрирование со слабосвязанной стратегией выполнено в [20]). Аналогичным образом необходимо переоценить роль неголономных ограничений, а также вспомогательной информации, полученной из данных о курсе, полученных с помощью GNSS, и ограничений по высоте, с учетом повышения доступности измерений GNSS.
Имея это в виду, основной вклад статьи заключается в следующем: во-первых, путем добавления ГЛОНАСС к существующим системам GPS/INS оценивается роль улучшенной доступности спутников для точности системы в городских условиях. Во-вторых, оценивается относительная производительность алгоритмов свободной и жесткой интеграции с ГЛОНАСС и без нее. При этом показано, что в некоторых случаях подход со слабой интеграцией с ГЛОНАСС может дать такие же характеристики, как и случай только с GPS с тесной интеграцией.Эта информация полезна для проектировщиков систем, поскольку алгоритмы слабой интеграции, как правило, легче реализовать, чем их аналоги с жесткой интеграцией. В-третьих, в присутствии ГЛОНАСС также оцениваются преимущества неголономных ограничений, помощи при рыскании, полученных с помощью GNSS, и ограничений по высоте, чтобы оценить их преимущества по сравнению со случаем, когда используется только GPS. Наконец, стоит отметить, что, хотя основное внимание уделяется роли ГЛОНАСС по эксплуатационным причинам, представленные результаты должны также применяться к другим будущим ГНСС, таким как Galileo и/или Compass.
Во-вторых, оценивается относительная производительность алгоритмов свободной и жесткой интеграции с ГЛОНАСС и без нее. При этом показано, что в некоторых случаях подход со слабой интеграцией с ГЛОНАСС может дать такие же характеристики, как и случай только с GPS с тесной интеграцией.Эта информация полезна для проектировщиков систем, поскольку алгоритмы слабой интеграции, как правило, легче реализовать, чем их аналоги с жесткой интеграцией. В-третьих, в присутствии ГЛОНАСС также оцениваются преимущества неголономных ограничений, помощи при рыскании, полученных с помощью GNSS, и ограничений по высоте, чтобы оценить их преимущества по сравнению со случаем, когда используется только GPS. Наконец, стоит отметить, что, хотя основное внимание уделяется роли ГЛОНАСС по эксплуатационным причинам, представленные результаты должны также применяться к другим будущим ГНСС, таким как Galileo и/или Compass.
Остальная часть документа организована следующим образом: во-первых, кратко рассмотрены релевантные теории в контексте этого документа с акцентом на различные алгоритмы интеграции (слабая связь по сравнению с сильной связью ) и доступная вспомогательная информация (GNSS- производный заголовок и неголономные ограничения). Во-вторых, описываются тесты, используемые для оценки эффективности различных стратегий интеграции. Затем результаты представляются и анализируются, после чего делается краткое изложение основных выводов.
Во-вторых, описываются тесты, используемые для оценки эффективности различных стратегий интеграции. Затем результаты представляются и анализируются, после чего делается краткое изложение основных выводов.
2. Обзор систем
В этом разделе дается краткий обзор GPS и ГЛОНАСС, а также инерциальных датчиков, используемых в конечной интегрированной системе.
2.1. GPS/ГЛОНАСС
GPS и ГЛОНАСС являются основными используемыми сегодня системами GNSS, и они во многом схожи, но имеют некоторые существенные отличия. Обе системы способны обеспечить различное количество воздушных, морских и любых других пользователей всепогодным трехмерным позиционированием, скоростью и временем в любой точке мира или околоземного пространства.Обе навигационные системы основаны на концепции «односторонней дальности», при которой неизвестная позиция пользователя получается путем измерения времени прохождения сигналов, транслируемых спутниками, в известных позициях и эпохах [21].
Основное различие между двумя системами заключается в том, что GPS и ГЛОНАСС работают с разными временными привязками и с разными системами координат [22,23].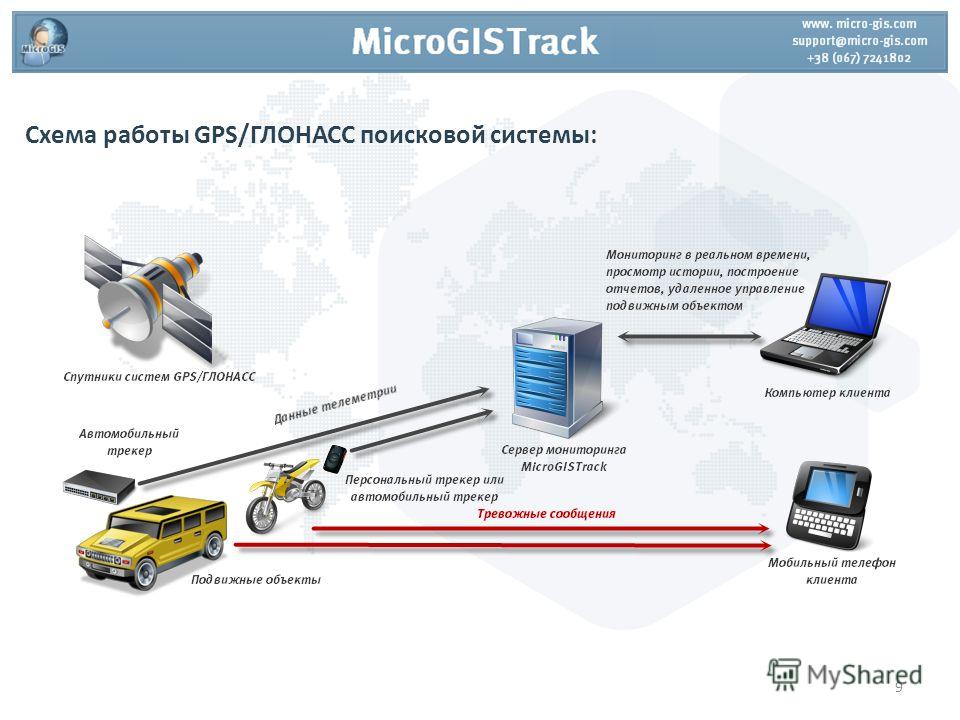 В частности, время GPS связано с UTC (USNO), универсальным скоординированным временем (UTC), установленным в Военно-морской обсерватории США.Напротив, время ГЛОНАСС связано с UTC (SU), UTC, поддерживаемым Россией. Смещение между двумя эталонами времени можно откалибровать, но эта информация еще не включена в навигационные сообщения, передаваемые спутниками. Это приводит к увеличению числа неизвестных, подлежащих оценке, с 4 до 5; три координаты положения пользователя и смещения часов приемника относительно двух шкал системного времени (одно смещение может быть заменено межсистемным смещением времени). Эта проблема со временем будет решена с помощью спутников ГЛОНАСС нового поколения ( i.е ., ГЛОНАСС-М), которые планируется транслировать смещение между двумя шкалами времени. Кроме того, разность данных GPS и ГЛОНАСС не требует дополнительного состояния, так как WGS84 и PZ90 известны и фиксированы и связаны вполне определенным математическим преобразованием (подробнее см. в [24]).
В частности, время GPS связано с UTC (USNO), универсальным скоординированным временем (UTC), установленным в Военно-морской обсерватории США.Напротив, время ГЛОНАСС связано с UTC (SU), UTC, поддерживаемым Россией. Смещение между двумя эталонами времени можно откалибровать, но эта информация еще не включена в навигационные сообщения, передаваемые спутниками. Это приводит к увеличению числа неизвестных, подлежащих оценке, с 4 до 5; три координаты положения пользователя и смещения часов приемника относительно двух шкал системного времени (одно смещение может быть заменено межсистемным смещением времени). Эта проблема со временем будет решена с помощью спутников ГЛОНАСС нового поколения ( i.е ., ГЛОНАСС-М), которые планируется транслировать смещение между двумя шкалами времени. Кроме того, разность данных GPS и ГЛОНАСС не требует дополнительного состояния, так как WGS84 и PZ90 известны и фиксированы и связаны вполне определенным математическим преобразованием (подробнее см. в [24]).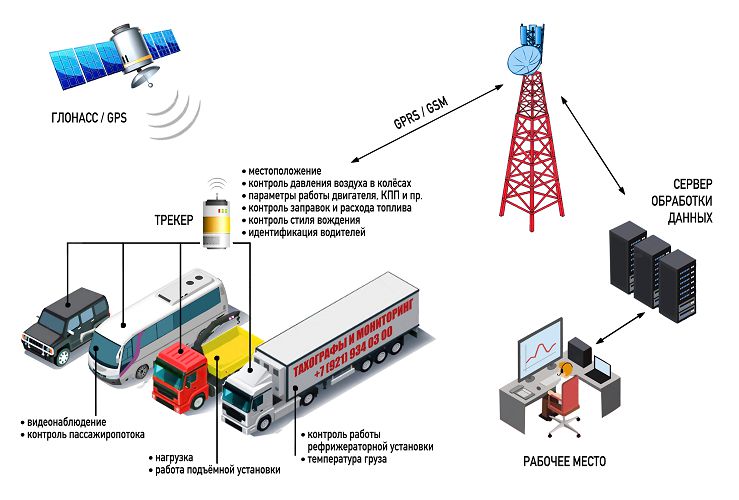 Другие различия связаны с природой сигнала, а именно с различной шириной полосы сигнала и схемами множественного доступа, которые не относятся к данной статье.
Другие различия связаны с природой сигнала, а именно с различной шириной полосы сигнала и схемами множественного доступа, которые не относятся к данной статье.
2.2. Недорогие инерциальные датчики
Большой прогресс в МЭМС сделал возможной разработку нового поколения недорогих инерциальных датчиков.Инерциальные измерительные блоки MEMS (IMU), то есть собственно датчик в сборе, характеризуются небольшими размерами, малым весом, низкой стоимостью и низким энергопотреблением по сравнению с инерциальными датчиками более высокого уровня. Эти функции делают МЭМС-датчики привлекательным вариантом для таких приложений, как автомобильная навигация. Однако датчики MEMS также характеризуются худшими характеристиками, поэтому их нельзя использовать в автономном режиме в течение длительного времени, хотя они хорошо подходят для интегрированных навигационных систем (обычно в сочетании с системами GPS), где внешние измерения могут ограничить рост их погрешности.IMU обычно состоит из триады акселерометров и гироскопов, уравнение измерения которых может быть выражено как:
f=f∼+ba+f⋅Sa+ηaω=ω∼+bg+ω⋅Sg+ηg
(1)
, где f и f̃ – фактическая и измеренная удельная сила,
Ω и Ω Актуальная и измеренная угловая скорость,
и B и B G Датчики датчики акселерометра и гироскопания соответственно
S и S и S G Масштабы датчика на масштабе датчика акселерометра и гироскопицы соответственно
η A и η г Датчик сенсорных шумов акселерометра и гироскопа соответственно.
Более подробные уравнения измерения можно найти в [25], включая дополнительные термины, такие как коэффициенты нелинейного масштабирования и коэффициенты поперечной связи. Они здесь не рассматриваются, поскольку их оценка нецелесообразна, учитывая количество и качество данных GNSS, используемых в этом исследовании.
Смещение датчика определяется как среднее значение выходного сигнала, полученного в течение определенного периода при фиксированных рабочих условиях, когда входной сигнал равен нулю. Смещение обычно состоит из двух частей: детерминированной части, называемой смещением смещения или смещением включения, и стохастической части, называемой дрейфом смещения или смещением во время выполнения.Смещение при включении, по сути, представляет собой смещение в измерении и является постоянным в течение одной миссии; он имеет детерминированную природу и поэтому может быть определен с помощью процедуры калибровки (или также может быть смоделирован статистически как случайный постоянный процесс).
Дрейф смещения — это изменение датчика во времени; дрейф смещения имеет случайный характер и поэтому должен моделироваться как стохастический процесс. Ошибка масштабного коэффициента представляет собой отношение изменения выходного сигнала датчика к изменению измеряемой физической величины.В идеальных условиях масштабный коэффициент должен быть равен единице. Эта ошибка имеет детерминированную природу, но обычно моделируется как случайный процесс. Ошибки инерциального датчика могут быть выражены в терминах случайного блуждания по углу (ARW) и случайного блуждания по скорости (VRW). Параметр ARW описывает среднее отклонение или ошибку, возникающую при интегрировании шума в выходной сигнал гироскопа. Точно так же определение параметра VRW основано на той же концепции для акселерометров.Типовые характеристики датчиков MEMS приведены в таблице , где для сравнения также приведены характеристики IMU навигационного и тактического уровня.Поскольку смещения гироскопа ухудшают положение в зависимости от куба времени [26], из таблицы очевидно, что датчики на основе МЭМС будут давать очень плохие навигационные результаты за короткое время, если они не интегрированы с другими системами (обычно GNSS) для ограничения ошибок.
Отсюда видно, что смещение при включении МЭМС-гироскопа составляет около 5400 град/ч, в то время как у датчиков навигационного и тактического класса оно значительно меньше. Кроме того, смещение во время движения может составлять 1040 град/ч в датчиках MEMS, тогда как для тактического гироскопа оно составляет около 1 град/ч.Эти параметры обеспечивают хорошую оценку производительности МЭМС по сравнению с датчиками более высокого класса.Таблица 1.
Сводка характеристик IMU для различных типов датчиков (из [6,27]).
Параметр Марка IMU Навигация Tactical Mems Accelerometers Управления (MG) 0. 0251 1 2.5 2.5 Функция включения (мг) — — 30 Масштабный коэффициент (PPM) 100 300 10 000 VRW (г/√Гц) — 2. 16e-06370e-06 Gyros Gyros Без прогона (° / H) 0,0022 1 <1 040 Внутри налиц (° / H) — — — — — — — — 5,400 5 400 Масштабный коэффициент (PPM) 5 150 150 10 000 10 000 ARW (° / H / √hz) 6. 927,5 226,8 Прибл. Стоимость >90 000 долл. США >20 000 долл. США <2 000 долл. США С этой целью в данной работе измерения GNSS обрабатываются в одноточечном режиме, поэтому не применяются дифференциальные поправки и не требуется развертывание опорной станции.Используются только наблюдаемые псевдодальности и Доплера (фазовая скорость).
Чтобы учесть тот факт, что спутниковые измерения при малых углах места, как правило, более зашумлены [28], измерениям взвешивают синус угла места спутника, как предложено в [19,27]. Чтобы учесть также различную точность, связанную с наблюдаемыми псевдодальностью и доплеровскими параметрами, вес (обратный дисперсии), связанный с общим измерением, выражается следующим образом:
где σm2 — либо дисперсия псевдодальности σPR2 или дисперсия скорости псевдодальности σPRточка2.
Решение GNSS получается с использованием метода WLS (взвешенных наименьших квадратов), уравнение которого:
Δx_=(HTWH)−1HTWΔρ_
(3)
, где Δ ρ — вектор невязки измерения,
H — геометрическая (расчетная) матрица,
Δ x — неизвестный вектор поправок к оценкам текущего состояния,
- W — весовая матрица элементов
4 w ii взяты из уравнения (2).
Состояния: ошибки положения, скорости и часов. Если рассматривается одна система GNSS (например, только GPS или ГЛОНАСС), ошибка часов моделируется двумя состояниями: смещением и дрейфом. Если объединяются две GNSS (например, в случае GPS/ГЛОНАСС), необходимо включить дополнительное состояние, представляющее межсистемное смещение времени.
3.1. Интеграция GNSS/INS
Интеграция GNSS/INS очень распространена, поскольку эти системы дополняют друг друга во многих аспектах.
В частности, ИНС более точна в краткосрочной перспективе, она может предоставлять данные с очень высокой скоростью, а также может предоставлять информацию об отношении.С другой стороны, GNSS более точна в долгосрочной перспективе, и ошибка практически не зависит от времени. В следующих разделах описываются два наиболее распространенных подхода к интеграции GNSS и инерциальных данных, а именно слабая и тесная связь.3.1.1. Слабосвязанный подход
Стратегия слабой связи (LC) также называется «децентрализованной» и включает фильтр Калмана (KF) для объединения параметров INS и GNSS. Другой оценщик KF или LS используется для вычисления навигационного решения GNSS.Схема LC показана на . Хотя подход LC относительно прост в реализации, основным недостатком подхода LC является то, что при недостаточном количестве спутников для расчета автономного решения GNSS инерциальная система не обновляется. В конечном итоге это приводит к более высоким ошибкам позиционирования [27] по сравнению с подходом с сильной связью (подробности ниже).
Для вычисления привязки GNSS здесь предпочтительнее использовать оценщик LS, чтобы упростить прямое сравнение LC/TC. В частности, при использовании метода наименьших квадратов для LC результаты будут такими же, как и в случае TC, если доступно достаточное количество спутников для вычисления решения.
Инерционное решение получается путем применения уравнений механизации для бесплатформенной конфигурации к ускорениям и угловым скоростям от IMU. Для этой работы механизация ИНС реализована в локальной структуре Восток-Север-Вверх (ENU). Детали уравнений механизации широко доступны в литературе (например, [26]) и поэтому здесь исключены.
Разница между INS и взвешенным методом наименьших квадратов (WLS) положение и скорость GNSS используются в качестве входных измерений для KF.Ковариационная матрица WLS используется в качестве ковариационной матрицы измерений R для KF:
R=cov(Δx_)=(HTWH)−1
(4)
Вышеприведенное подразумевает, что только подматрицы, соответствующие состояниям, используемым в обновлении, извлекаются из ковариационной матрицы WLS (детали следуйте в ближайшее время).
Вектор состояния комбинированного GNSS/INS KF в LC архитектуре:
Δx _ = [ΔP_nδv_nɛ_nδb_aδb_gδs_aδs_g] t
(5)
(5)
(5)
(5)
с ΔP N Положение Ошибка ошибки, ΔV N Ошибка скорости, ε N Отношение Ошибка вектор, Δb A вектор ошибки смещения акселерометра, δb g вектор ошибки смещения гироскопа, δS a вектор масштабного коэффициента акселерометра и δS g масштабный коэффициент гироскопа.Ошибки часов приемника GNSS не включены, потому что они легко отделяются от других состояний после решения WLS.
Модель ошибки ИНС (для положения, скорости и положения) типична для того, что широко доступно в литературе (например, [26]). Векторы ошибок смещения δb a , δb g моделируются как процессы Гаусса-Маркова 1-го порядка и включают сумму смещений при запуске и включении [19].
Векторы масштабных коэффициентов δS a , δS g также моделируются как процессы Гаусса-Маркова 1-го порядка (там же.). IMU на основе MEMS, используемый в этой работе, представляет собой IMU Crista, спектральная плотность случайного шума которого и параметры Гаусса-Маркова (GM) показаны на рис.Таблица 2.
Crista IMU Спектральная плотность случайного шума и параметры Гаусса-Маркова.
Акселерометры Гироскопы смещения ГМ Параметры Масштабный коэффициент ГМ Параметры Шум смещения ГМ Параметры Масштабный коэффициент ГМ Параметры Шум Σ ( M / S 2 ) τ ( S ) Σ ( PPM ) τ ( S ) G / HZ Σ (DEG / S ) τ ( S ) Σ ( PPM ) τ ( S ) (град/с)/Гц 0. 00772 270 10 000 18 000 300 000 300E-6 192 192 350 10 000 18 000 220 220 3.1.2. Подход с сильной связью
Стратегия с сильной связью (TC) также называется «централизованной», поскольку существует только один центральный KF, обрабатывающий как наблюдения GNSS, так и данные INS.
Схема ТК показана на . Хотя этот подход является более сложным, он обычно обеспечивает лучшую производительность, поскольку обновления могут выполняться независимо от того, сколько спутников отслеживается.В отличие от случая LC, разница между измеренной и предсказанной ИНС псевдодальностью и доплеровскими наблюдаемыми используется в качестве входных измерений для KF. Соответствующая ковариационная матрица измерений определяется с учетом точности, присущей измерениям GNSS, и точности, зависящей от высоты, как и в случае LC (см. уравнение (2)).
Вектор состояния TC KF имеет те же 21 состояние, что и для случая LC (см. уравнение (5)), но также дополнен смещением и дрейфом часов приемника GPS.Если включены измерения ГЛОНАСС, необходимо также учитывать межсистемный временной сдвиг GPS-ГЛОНАСС, и в этой работе он моделируется как случайная константа.
И слабая, и узкая стратегии здесь реализованы в конфигурации с замкнутым контуром, что означает, что состояния ошибок навигации, смещения и коэффициента масштабирования, выдаваемые KF, используются для корректировки входных данных INS.
Конфигурация с замкнутым контуром необходима, когда ИНС с низкими характеристиками используется для уменьшения роста инерционной ошибки [6], что, в свою очередь, удовлетворяет допущениям о малом угле, используемым для вывода уравнений ошибки ИНС.3.2. Вспомогательные методы
В этом разделе кратко рассматриваются детали использования курса, полученного с помощью GNSS, а также псевдонаблюдения за скоростью и высотой транспортного средства, чтобы помочь улучшить общее решение.
3.2.1.
Вспомогательная информация о курсе, полученная с помощью GNSS Для улучшения оценки курса можно использовать вспомогательную информацию, полученную с помощью GNSS. Для включения измерений курса в модель измерений фильтра GNSS/INS требуется уравнение, связывающее ошибки курса с состояниями ошибок системы [5].bn(2,2))
(6)
, где шапки вверху означают, что количества оцениваются.
Соотношение между оценочной и фактической матрицей поворота от тела к кадру ENU:
с E n = [ ε E ε N ε U ] T ε U ] T
С учетом этого уравнение (6) принимает вид:
ψ^=arctan(R^bn(1,2)R^bn(2,2))=arctan(Rbn(1,2)+ɛURbn(2,2)−ɛNRbn(3,2)−ɛURbn( 1,2)+Rbn(2,2)+ɛERbn(3,2))
Вычисляя дифференциал предыдущего уравнения, уравнение ошибки курса получается как:
δψ=∂ψ∂ɛEδɛE+∂ψ∂ɛNδɛN+∂ψ∂ɛUδɛU
(7)
с:
∂Ψ^∂ɛE= R^bn(1,2)Rbn(3,2)[R^bn(2,2)]2+[R^bn(1,2)]2≈R^bn( 1,2)R^bn(3,2)[R^bn(2,2)]2+[R^bn(1,2)]2∂Ψ^∂ɛN= R^bn(2,2)Rbn (3,2)[R^bn(2,2)]2+[R^bn(1,2)]2≈R^bn(2,2)R^bn(3,2)[R^bn( 2,2)]2+[R^bn(1,2)]2∂Ψ^∂ɛU= R^bn(1,2)Rbn(1,2)+R^bn(2,2)Rbn(2 ,2)[R^bn(2,2)]2+[R^bn(1,2)]2≈1
В уравнении (7) измерение:
δψ=[ψINS−ψGNSS]=[ψINS−arctan(VEVN)]
(8)
, где ψ INS – азимут, оцененный в фильтре GNSS/INS, 0GNSS 90 азимут, полученный с помощью GNSS, в зависимости от компонентов скорости на востоке и севере, точность которого выражается как:
, где V HGNSS — горизонтальная скорость (оцененная по GNSS) и σVHGNSS2 — связанная дисперсия.
Уравнение внешнего курса может быть встроено в модель измерения GNSS/INS KF и используется, когда горизонтальная скорость транспортного средства достаточно высока. Для этой работы это измерение используется только тогда, когда скорость транспортного средства превышает 5 м/с, так как это дало разумные результаты. Другие пороги не исследовались, и это оставлено на будущее.
3.2.2. Неголономные ограничения и псевдоизмерения высоты
В автомобильной навигации одним из возможных подходов к уменьшению накопления ошибок ИНС является применение ограничений, основанных на движении транспортного средства.Другими словами, можно сгенерировать уравнения ограничений, отражающие поведение транспортного средства во время навигации [15–17].
В контексте данного документа предполагается, что транспортное средство не скользит вбок или не прыгает/подпрыгивает, так что движение происходит в основном в продольном направлении транспортного средства. Приведенные выше предположения составляют так называемые неголономные ограничения и математически описываются как:
где vxb и vzb – компоненты скорости в поперечном и вертикальном направлениях тела (автомобиля) соответственно, а η x и η z – (фиктивные) измерительные шумы, обозначающие возможные расхождения в сделанных выше предположениях.
Последние необходимы, поскольку возможны небольшие перемещения в боковом и вертикальном направлениях.Уравнение (10) можно использовать во время перебоев в работе GNSS, чтобы облегчить навигацию INS, используя следующее уравнение:
δV_b=RnbδV_n+RnbV_n×ɛ_n
(11)
, который выражает, как помощь скорости в каркасе тела, δv b , может улучшить оценку скорости и ориентации.
Второе уравнение ограничения может быть получено с учетом того факта, что высота существенно не изменяется при наземной навигации в течение коротких периодов времени.Следовательно, при отключении GNSS высоту можно считать постоянной и равной эталонному значению h ref , рассчитанному непосредственно перед отключением в условиях хорошей видимости [19]. Математически это записывается так:
Хотя это может показаться эквивалентным второму уравнению в уравнении (10), между ними есть небольшая разница. В частности, уравнение (10) относится к системе координат тела, тогда как псевдонаблюдение за высотой применяется в системе координат локального уровня.
Поскольку возможно, что каркас кузова наклонен относительно истинной вертикали (т.г., если автомобиль наклонен из-за неравномерного распределения веса), эти два ограничения, строго говоря, не эквивалентны.Как неголономные ограничения, так и псевдоизмерения высоты могут использоваться в качестве моделей измерения дополнительного фильтра Калмана во время перебоев в работе GNSS, как показано на рис. Таким образом, неголономные ограничения и ограничения по высоте называются здесь соответственно псевдоизмерениями скорости и высоты. Наконец, хотя это и не показано на , их также можно применять при наличии обновлений GNSS.
Вспомогательная схема ограничения скорости/высоты.
4. Описание испытаний и оборудование
Эксперимент по сбору данных был проведен в автомобиле в центре города Калгари, Канада, 22 июля 2010 г., около 14:00 по местному времени. Центр города Калгари представляет собой типичный городской сценарий, характеризующийся небоскребами, поэтому это сложная среда для спутниковой навигации из-за проблем с блокировкой и многолучевым распространением.
Общая продолжительность теста около 23 мин; скорость автомобиля варьировалась от 0 до 50 км/ч с частыми остановками из-за светофоров, а общее пройденное расстояние составило около 10 км.Испытательное оборудование состоит из спутникового приемника и MEMS IMU (технические характеристики которого приведены в ) для проведения эксперимента и более точных устройств в качестве эталона. В частности, для тестирования различных конфигураций используются приемник NovAtel Receiver ProPak V3, способный принимать спутниковые сигналы GPS и ГЛОНАСС, и Crista IMU от Cloud Cap Technology. Признано, что использование высококачественного приемника несовместимо с идеей недорогой системы. Однако недорогого приемника GPS/ГЛОНАСС для тестирования не оказалось.Тем не менее, ожидается, что различия между использованием только GPS и GPS и ГЛОНАСС в значительной степени не зависят от приемника.
Эталонное решение получено с использованием NovAtel SPAN (Synchronized Position Attitude Navigation), интегрированной системы, состоящей из приемника NovAtel OEM4 и IMU тактического класса HG1700.
Данные SPAN обрабатываются программным обеспечением NovAtel Inertial Explorer с использованием фазовых и доплеровских измерений в режиме двойной разности. Базовое расстояние (относительно базовой станции, расположенной в кампусе Университета Калгари) варьировалось в пределах 6–7 км.Точность эталонного решения в этих условиях представлена в . Все оборудование было размещено на крыше автомобиля, как показано на рисунке, а полный тест траектории показан на рисунке .Тестовая траектория (из Google Earth).
Таблица 3.
Точность эталонного решения.
90 253
Информация Точность Позиция дм уровня Скорость см / с уровня Отношение <1 град Для облегчения анализа данных три сегмента траектории, представляющие различные оперативные сценарии, рассматриваются и изучаются отдельно.
Видимость и поведение GDOP показаны на , где также выделены сегменты. Параметр GDOP представляет собой геометрический фактор, представляющий увеличение стандартного отклонения ошибок измерения на решение [21].Видимость и GDOP во время теста.
Основные характеристики покрытия GNSS на всех сегментах приведены в таблице с точки зрения доступности решения и максимальной продолжительности простоя. Это ясно показывает преимущества включения наблюдений ГЛОНАСС в этот сценарий.
Таблица 4.
Доступность GNSS и длительность простоя.
+
Сегмент GNSS Созвездие Решение Наличие Серия Решение перелива 1 GPS 73% 60 сек GPS / GLONASS 81% 30 S 30 S 2 GPS 53% 60 S 60 2 GPS / ГЛОНАСС 55% 60 S 9089 3 GPS GPS 81% 10 с GPS/ГЛОНАСС 86% 8 с Участок 1 можно было рассматривать как полурабочие условия стоянки и спутник начинался на хорошей стоянке открытое небо (4–10 видимых спутников GPS).
Вторая часть сегмента 1 находилась в требовательном городском каньоне с плохим спутниковым покрытием (0–6 доступных спутников GPS). Видимость спутника в случаях только GPS и GPS/ГЛОНАСС показана на . В случае использования только GPS очевидны частые частичные и полные отключения, особенно в восточном конце длинной восточно-западной части траектории и вдоль северно-южной части траектории (расположенной недалеко от центра города Калгари). Самый длинный период GPS, в течение которого автономное решение GPS недоступно (далее именуемый «сбой»), составляет около 60 с и выделен пунктирным кружком в верхней части .В случае с GPS/ГЛОНАСС этот период все еще в значительной степени присутствует, но сокращается за счет комбинированной фиксации GPS/ГЛОНАСС, как показано в нижней части .Видимость GNSS на участке траектории 1.
Сегмент 2 представляет собой очень сложный сценарий. Количество видимых спутников GPS на траектории представлено (вверху), показывая два длительных частичных/полных отключения GPS (около 60 с) на двух участках восток/запад.
Эти две части траектории соединяются поворотом в самой западной части центра города с достаточной видимостью для непрерывной фиксации GPS.Включение ГЛОНАСС (внизу) существенно не улучшает спутниковое покрытие на этом участке, что также показано на рис.Видимость GNSS на участке траектории 2.
Сегмент 3 представляет собой более благоприятный сценарий, в котором количество видимых спутников GPS во время траектории представлено (вверху). После некоторых коротких частичных отключений GPS (длительностью несколько секунд) в начале сегмента видимость спутника позволяет практически непрерывно определять местоположение GPS.На траектории было встречено всего два коротких сбоя. Включение ГЛОНАСС (внизу) еще больше увеличивает количество доступных спутников, сокращая продолжительность простоев и повышая доступность решения ().
Видимость GNSS на участке траектории 3.
5. Результаты и анализ
Как упоминалось ранее, основной целью этой работы было сравнение производительности GPS и GPS/ГЛОНАСС, интегрированных с недорогой ИНС, с особым акцентом на оценку преимуществ включения ГЛОНАСС.
Стратегии слабой и тесной интеграции тестируются, чтобы определить, играет ли тип интеграции значительную роль. Псевдоизмерения, основанные на предположениях о типичном поведении транспортного средства, включены в обе архитектуры интеграции для оценки эффективности в этом контексте, как и наблюдения за рысканьем, полученные с помощью GNSS.С этой целью рассматриваются несколько конфигураций обработки. Базовая конфигурация в случаях свободной и тесной интеграции основана только на GPS и соответственно обозначается как «LC GPS/INS» и «TC GPS/INS».Аналогично включение ГЛОНАСС обозначается как «LC GG/INS» и «TC GG/INS». Использование ограничений обозначается добавлением Y (измерение рыскания, полученное с помощью GNSS), V (псевдоизмерение скорости) и H (псевдоизмерение высоты). Например, LC GG/INS YVH представляет слабосвязанное решение GPS/ГЛОНАСС со всеми тремя ограничениями.
5.1. Решения для свободных соединений
5.1.1. Участок 1
В показаны траектории, полученные при различных подходах LC.
Решение GPS/INS показывает большие ошибки во время вышеупомянутого самого продолжительного отключения GPS, при этом максимальные ошибки достигают около 400 м.Добавление ГЛОНАСС к этому решению показывает очевидные улучшения по сравнению с базовым случаем. На самом деле изолированная фиксация GPS/ГЛОНАСС (обведена кружком в правой части ) позволяет траектории оставаться относительно близкой к эталонной между вторым и третьим поворотами, тогда как без ГЛОНАСС возникают гораздо большие ошибки. Кроме того, конфигурация LC GG/INS обеспечивает более высокую производительность, чем решение только для GPS, на участке с востока на запад (около значений восточного направления 705 000), где ошибка LC GPS/INS имеет тенденцию к росту из-за коротких отключений только GPS (15–15 000). продолжительность 20 с).Наконец, траектория, полученная с помощью GPS/ГЛОНАСС/ИНС, дополненная данными о рыскании, полученными с помощью ГНСС, а также псевдоизмерениями скорости и высоты, показывает значительные улучшения по сравнению с другой конфигурацией с небольшими расхождениями с эталонной траекторией.Траектории, полученные методом слабой связи (участок 1).
Вклад различных комбинаций ограничений в решение положения суммирован в . Как видно, рыскание (направление, полученное с помощью GNSS) в целом дает мало преимуществ.Напротив, скорость дает большое преимущество. Ограничение по высоте не улучшает среднеквадратичную точность, но снижает максимальную ошибку положения примерно на 28%.
Таблица 5.
Ошибка позиционирования, полученная с конфигурациями LC.
Конфигурация Ошибка положения (м) Среднеквадратичное значение Максимум East North до East North до ЛК GPS/INS 48. 448,7 16,3 347,0 341,2 48,0 LC GG / ИНС 20,2 15,0 8,0 109,6 51,2 34,4 LC GG / ИНС Y 15.0 15. 012.9 70289 702 80.1 80.1 48.2 48.2 33.1 LC GG / INS YV 8.1 6.6 3,8 41.9 40.0 8 80289 80289 LC GG / Ins YVH 7. 95.6 3,9 3,9 33.9 20.5 6.3 5.1.2. Сегмент 2
показывает траектории, полученные при различных подходах LC. Решение GPS/INS дает большие ошибки во время сбоев GPS. Включение ГЛОНАСС не улучшает видимость в критических зонах, как ожидалось на основании и . Соответственно, решение LC GG/INS показывает ошибки, аналогичные случаю только GPS.Кроме того, включение ограничений также показывает большие расхождения с эталоном во время длительных отключений GNSS.
Траектории, полученные методом слабой связи (участок 2).
5.1.3. Участок 3
В показаны траектории, полученные с различными подходами LC.
В начале сегмента GPS/INS показывает некоторые расхождения с эталоном из-за частичных отключений GPS. Однако на оставшейся части участка при хорошей видимости спутника полученная траектория очень близка к эталонной.Включение измерений ГЛОНАСС, как и ожидалось, приводит к уменьшению первоначальных разногласий. С добавлением помощи рыскания, полученной с помощью GNSS, и ограничений движения по скорости и высоте полученная траектория близка к эталонной на протяжении всего сегмента.Траектории, полученные методом слабой связи (участок 3).
5.2. Решения для герметичного соединения
5.2.1. Участок 1
В показаны траектории, полученные при различных заходах на посадку TC.По сравнению с результатами ЖХ в , все решения показывают значительное улучшение. Это согласуется с предыдущими исследованиями и связано с использованием данных GNSS, когда видно несколько спутников. В частности, базовая конфигурация (TC GPS/INS) не содержит большого дрейфа во время длительного отключения GPS на северном/южном участке траектории.
В этом случае, хотя включение наблюдений ГЛОНАСС по-прежнему дает лучшее общее решение, относительное улучшение меньше, чем в случае слабого интегрирования.Это снова связано с повышенной наблюдаемостью в результате тесной интеграции. Наконец, траектория, полученная также путем интегрирования помощи при рыскании и псевдонаблюдений за скоростью и высотой, показывает значительные улучшения по сравнению с другой конфигурацией TC, особенно в течение определенной выше критической зоны.Траектории, полученные методом сильной связи (участок 1).
Характеристики различных конфигураций TC с точки зрения среднеквадратичной ошибки и максимальной ошибки положения приведены в .
Таблица 6.
Ошибка положения, полученная с конфигурациями TC.
Конфигурация Ошибка положения (м) Среднеквадратичное значение Максимум East North до East North до TC GPS/INS 14. 120,4 13,3 61,4 70,1 55,7 TC GG / ИНС 8,2 12,9 13,0 61,1 69,7 46,4 TC GG / ИНС YVH 4,8 9,5 4,0 18,4 30,5 6,4 Траектории, полученные при различных подходах TC для этого сценария, показаны на .
Решение GPS/INS не дает больших ошибок во время сбоев GPS, как в соответствующем случае LC, благодаря способности вычислять интегрированное положение в случае частичных сбоев GNSS. Несколько лучшая траектория получается при включении измерений ГЛОНАСС и рассмотренных ограничений.Траектории, полученные методом сильной связи (участок 2).
5.2.3. Участок 3
Траектории, полученные при различных подходах TC для этого сценария, представлены в .Как и ожидалось, результаты очень близки к эталонным из-за хорошего покрытия GNSS. Решение GPS/INS показывает некоторые разногласия во время отключений GPS в начале сегмента. Опять же, включение измерений ГЛОНАСС приводит к уменьшению вышеупомянутых разногласий. При добавлении помощи рыскания, полученной с помощью GNSS, и ограничений движения по скорости и высоте полученная траектория близка к эталонной на протяжении всего сегмента.
Траектории, полученные методом сильной связи (участок 3).
5.3. Сравнение свободных и узких растворов
В этом разделе сравниваются свободные и узкие решения для различных сегментов теста.
5.3.1. Сегмент 1
Для лучшего сравнения проанализированных конфигураций с архитектурами LC и TC среднеквадратичные ошибки положения, скорости и ориентации представлены в . Основные замечания, вытекающие из этого рисунка:
—
при базовой интеграции GPS/INS архитектура TC обеспечивает значительно лучшее горизонтальное решение и аналогичный результат по высоте, чем LC, как ожидалось и как показано в предыдущей работе;
—
, включая наблюдения ГЛОНАСС, обеспечивает значительное улучшение производительности как для LC, так и для TC архитектур с точки зрения оценки положения, скорости и азимута;
—
в случае GPS/ГЛОНАСС без дополнительной поддержки архитектура TC обеспечивает лишь немного лучшее решение по сравнению со случаем LC;
—
конфигурации со слабой связью GPS/ГЛОНАСС и жесткой связью только с GPS (без других вспомогательных средств) обеспечивают очень похожие характеристики;
—
, в том числе помощь по азимуту, основанная на GNSS, и ограничения по скорости/высоте обеспечивают значительные улучшения как для случаев LC, так и для TC с точки зрения положения, скорости и азимута;
—
результаты, полученные при использовании слабого и тесного интегрирования для конфигураций GG/INS YVH, очень похожи.
Сравнение архитектур LC и TC с точки зрения среднеквадратичных ошибок положения, скорости и ориентации (сегмент 1).
Практические последствия приведенных выше соображений двояки. Во-первых, в среде такого типа слабосвязанная конфигурация GPS/ГЛОНАСС может заменить сильносвязанную конфигурацию только GPS без снижения производительности. Такой подход проще реализовать, что снижает затраты на разработку. Кроме того, решение только для GNSS ( i.е. , без инерционного) доступен и в этом случае. Во-вторых, добавление ограничений на транспортные средства в равной степени полезно для случаев LC и TC, что еще больше размывает преимущества подхода TC.
5.3.2. Сегмент 2
Среднеквадратичные ошибки архитектур LC и TC для сегмента 2 представлены в . Основные замечания, вытекающие из этого рисунка:
—
Архитектура LC не обеспечивает удовлетворительную производительность для каждой тестируемой конфигурации (с GPS и ГЛОНАСС или с ограничениями движения), показывая большие ошибки при сбоях GNSS;
—
Архитектура TC показывает лучшую производительность по сравнению с архитектурой LC для каждой протестированной конфигурации;
—
Включение наблюдений ГЛОНАСС обеспечивает небольшое улучшение производительности архитектуры TC с точки зрения оценки положения, скорости и азимута;
—
Включение основанных на GNSS вспомогательных средств рыскания и ограничений скорости и высоты в конфигурацию TC GG/INS улучшает оценку положения, скорости и азимута.
Сравнение архитектур LC и TC с точки зрения среднеквадратичных ошибок положения, скорости и ориентации (сегмент 2).
Из этих результатов, в отличие от сегмента 1, становится ясно, что тесная интеграция по-прежнему предпочтительнее, поскольку в целом она обеспечивает значительно более высокую производительность.
5.3.3. Сегмент 3
Среднеквадратичные ошибки архитектур LC и TC для этого сегмента показаны в . Основные замечания, вытекающие из этого рисунка:
—
В этом относительно благоприятном сценарии позиционные характеристики всех рассматриваемых конфигураций очень похожи;
—
Включение наблюдений ГЛОНАСС как для LC, так и для TC обеспечивает небольшие улучшения с точки зрения положения и скорости;
—
Включение основанных на GNSS вспомогательных средств рыскания и ограничений скорости/высоты приводит к уменьшению ошибок скорости и азимута, но не дает преимуществ в отношении среднеквадратичных ошибок положения.
Сравнение архитектур LC и TC с точки зрения среднеквадратичных ошибок положения, скорости и ориентации (сегмент 3).
Как и в случае с сегментом 1, эти результаты показывают, что использование приемника GPS/ГЛОНАСС в системе LC должно давать результаты, аналогичные случаю TC, но с более простой системой и меньшим временем разработки.
Для оценки общей производительности рассматриваемых конфигураций среднеквадратичные ошибки для трех сегментов показаны на .
Таблица 7.
Сравнение производительности между конфигурациями LC и TC для трех сегментов.
Конфигурация СКО Ошибка положения (м) Ошибка скорости (м/с) Ошибка ориентации (градусы) 4
East North до East North до Ролл Шаг Рыскание LC28 72,2 20,8 3,30 4,06 0,68 1,9 2,5 41,2 LC GG / ИНС 36,6 41,0 17,3 2,24 2,41 0. 631,8 1,8 2.5 39 33.8 33.8 LC GG / Ins YVH 37.1 37.1 42,5 3.2 2.14 2.41 0.10 1. 11,1 16,0 TC GPS / ИНС 11,8 18,4 15,8 1,08 1,44 0,57 2,2 1,5 33,9 TC GG / ИНС 80289 80289 0,6 13. 814.1 0,84 1.03 1.03 0,47 0,47 1,6 1,8 27.8 27.8 TC GG / Ins YVH 13.5 4.1 4.1 4. 10.41 0.41 0,87 0,87 0,10 1.0 1.0 8.4 4. Вывод
Эта работа смотрит на благо в том числе ГЛОНАСС в интегрированных системах GPS / INS, особенно в среда городского каньона. Также был рассмотрен эффект использования различных ограничений движения транспортных средств. Данные были собраны в центре Калгари и обработаны с использованием различных конфигураций. Для проанализированных данных основные выводы таковы:
—
В условиях, когда видимость со спутника недостаточна для автономного позиционирования GNSS примерно в 50% случаев, преимущества ГЛОНАСС при слабосвязанной реализации минимальны.
Однако в тесно связанной реализации ГЛОНАСС обеспечивает значительные улучшения. В этом отношении эти результаты аналогичны предыдущим результатам, полученным с системами GPS/INS.—
В условиях, когда автономное GNSS-позиционирование возможно в 70 % времени и более, включение ГЛОНАСС в свободную интеграцию обеспечивает производительность, аналогичную системе жесткой связи только с GPS. Это говорит о том, что можно создать более простую систему без ущерба для навигационных характеристик, просто добавив измерения ГЛОНАСС.В свою очередь, это напрямую влияет на время и стоимость разработки системы.
—
В благоприятных условиях, где большую часть времени доступны решения GNSS, включение GLONASS дает мало преимуществ, поскольку в системе уже преобладают ошибки GNSS, поскольку свободная инерциальная навигация не нужна.
—
Включение помощи по азимуту, полученной с помощью GNSS, и псевдонаблюдений скорости/высоты обеспечивает значительное улучшение производительности независимо от стратегии интеграции.
Кроме того, в этом случае результаты между слабой и тесной интеграцией очень похожи, что еще больше стирает преимущества подхода с жесткой интеграцией.
Основываясь на этих результатах, включение наблюдений ГЛОНАСС дает некоторые существенные преимущества по сравнению с интегрированными системами, использующими только GPS. Хотя это и не определено здесь количественно, аналогичные результаты можно было бы ожидать и при включении данных других GNSS (например, Galileo).
Список литературы
1. Cai C., Gao Y. Комбинированный алгоритм навигации GPS/ГЛОНАСС для использования в условиях ограниченной видимости спутников.Дж. Навиг. 2009; 62: 671–685. [Google Академия]2. Онг Р., Петовелло М.Г., Лашапель Г. Надежность разрешения неоднозначности с использованием GPS и ГЛОНАСС. Труды Международного технического совещания Института навигации; Сан-Диего, Калифорния, США. январь 2010 г.; стр. 591–606. [Google Академия]3. Райан С., Петовелло М.Г., Лашапель Г. Расширение возможностей GPS для судоходства в стесненных водных путях. В: Уйт де Хааг М., Гебре-Эгзиабхер Д., Петовелло М.Г., редакторы. ION GPS Redbook Vol. VII Интегрированные системы.Институт навигации; Манассас, Вирджиния, США: 2010. стр. 206–214. [Google Академия]4. Хьюитсон С., Ван Дж. Расширенный автономный мониторинг целостности приемника (eRAIM) для интеграции GNSS/INS. Дж. Сурв. англ. 2010; 136:13–22. [Google Академия]5. Годха С. М. С. Тезис. Университет Калгари; Калгари, AB, Канада: 2006. Оценка производительности недорогого IMU DGPS на основе MEMS, интегрированного с DGPS для приложения навигации наземных транспортных средств. [Google Академия]6. Годха С., Кэннон М.Е. Интегрированная система GPS/MEMS INS для навигации в городских районах.GPS раствор. 2007; 11: 193–203. [Google Академия]7. Наяк Р.А. РС. Тезис. Университет Калгари; Калгари, AB, Канада: 2000. Надежная и непрерывная городская навигация с использованием нескольких GPS-антенн и недорогого IMU. [Google Академия]8. Шин Э., доктор философии. Тезис. Университет Калгари; Калгари, AB, Канада: 2005. Методы оценки для недорогой инерциальной навигации. [Google Академия]9. Мезенцев О. к.т.н. Тезис. Университет Калгари; Калгари, AB, Канада: 2005 г. Сенсорное обеспечение пешеходной навигации HSGPS.[Google Академия] 10. Абдель-Хамид В., доктор философии. Тезис. Университет Калгари; Калгари, AB, Канада: 2005. Повышение точности интегрированных систем MEMS-IMU/GPS для приложений навигации наземных транспортных средств. [Google Академия] 11. Сайед З., Аггарвал П., Янг Ю., Эль-Шейми Н. Улучшенная навигация транспортных средств с помощью тесно связанной интеграции. Материалы конференции IEEE по автомобильным технологиям, Марина-Бэй; Сингапур. май 2008 г.; стр. 3077–3081. [Google Академия] 12. Хан С., Ван Дж. Навигация на наземном транспортном средстве с интеграцией GPS и уменьшением производительности INS за счет увеличения скорости.Дж. Навиг. 2010;63:153–166. [Google Академия] 13. Лехнер В., Йеске Р., Виег С., Клюшников С. Интеграция GPS, ГЛОНАСС и ИНС на основе необработанных данных — первые результаты экспериментального исследования. Материалы 48-го ежегодного собрания Института навигации; Дейтон, Огайо, США. июнь 1992 г.; стр. 351–358. [Google Академия] 14. Риннан А., Сигмонд М.Э., Робертсен А., Гундерсен Н. Квалификация гибридного решения GNSS и IMU. Материалы конференции по динамическому позиционированию; Хьюстон, Техас, США. Октябрь 2009 г.[Google Академия] 15. Суккарие С., к.т.н. Тезис. Сиднейский университет; Сидней, Австралия: 2000. Низкая стоимость, высокая надежность, вспомогательные инерциальные навигационные системы для автономных наземных транспортных средств. [Google Академия] 16. Шин Э. М. С. Тезис. Университет Калгари; Калгари, AB, Канада: 2001. Повышение точности недорогих INS/GPS для наземных приложений. [Google Академия] 17. Кляйн И., Филин С., Толедо Т. Псевдоизмерения в помощь ИНС при сбоях GPS. Навигация. 2010;57:25–34. [Google Академия] 18. Ангрисано А., Петовелло М.Г., Пульяно Г. Интеграция GNSS/INS в автомобильную городскую навигацию. Материалы 23-го Международного технического совещания отдела спутников Института навигации; Портленд, штат Орегон, США. сентябрь 2010 г.; стр. 1505–1512. [Google Академия] 19. Ангрисано А. к.т.н. Тезис. Университет Партенопы в Неаполе; Неаполь, Италия: 2010. Методы интеграции GNSS/INS. [Google Академия] 20. Вандер Кайлен Л., Лейссенс Дж., ван Меерберген Г. Использование приемника AsteRxi GNSS/MEMS IMU в системе позиционирования контейнеров.Труды симпозиума по местоположению и навигации; Индиан-Уэллс, Калифорния, США. Май 2010 г. [Google Scholar] 21. Каплан Е.Д., Лева Ю.Л. Основы спутниковой навигации. В: Каплан Э.Д., Хегарти С.Дж., редакторы. Понимание GPS: принципы и приложения. 2-е изд. Артек Хаус; Норвуд, Массачусетс, США: 2007. [Google Scholar]22. Мисра П., Пратт М., Берк Б. Расширение GPS/LAAS с помощью ГЛОНАСС: оценка эффективности. Материалы 11-го Международного технического совещания отдела спутников Института навигации; Нэшвилл, Теннесси, США.сентябрь 1998 г.; стр. 495–502. [Google Академия] 23. Гальоне С., Ангрисано А., Пульяно Г., Робустелли У., Сантамария Р., Вултаджио М. Стохастическая сигма-модель для псевдодальности спутника ГЛОНАСС. заявл. Геомат. 2011;3:49–57. [Google Академия] 24. Митрикас В.В., Ревнивых С.Г., Быханов Е.В. WGS84/PZ90 Определение параметров преобразования на основе лазерной и эфемеридной обработки долговременных орбитальных данных ГЛОНАСС. Материалы 11-го Международного технического совещания отдела спутников Института навигации; Нэшвилл, Теннесси, США.сентябрь 1998 г.; стр. 1625–1636. [Google Академия] 25. Чатфилд А. Основы высокоточной инерциальной навигации. АИАА Инк .; Вашингтон, округ Колумбия, США: 1997. [Google Scholar]26. Джекели С. Инерциальные навигационные системы с геодезическими приложениями. Вальтер де Грюйтер; Нью-Йорк, штат Нью-Йорк, США: 2000. [Google Scholar]27. Петовелло М.Г., Кэннон М.Е., Лашапель Г. Преимущества использования IMU тактического класса для высокоточного позиционирования. Навигация. 2004; 51:1–12. [Google Академия] 28. Спилкер Дж. Дж. Младший. Спутниковое созвездие и геометрическое ослабление точности.В: Паркинсон Б., Спилкер Дж.Дж. младший, редакторы. Глобальная система позиционирования: теория и приложения. Том. 1 АИАА Инк .; Вашингтон, округ Колумбия, США: 1996. [Google Scholar]Данные ГЛОНАСС FDMA для позиционирования RTK: анализ пяти систем
Мгновенное одно- и двухчастотное позиционирование на базовой линии между CUT0 и CUTA. Предполагается, что дифференциальные атмосферные задержки отсутствуют.
Формальный анализ и анализ с помощью моделирования
Среднее плавающее значение неоднозначности и фиксированная точность позиционирования за одну эпоху для восточного, северного и верхнего компонентов приведены в таблице 2 для различных систем.Значения точности с фиксированной неоднозначностью получаются из матриц ковариации условных координат и не отражают возможности надежного разрешения неоднозначностей. Для случаев только ГЛОНАСС включаются только эпохи с шестью или более видимыми спутниками. Как упоминалось выше, \(F\) наименее точные лямбда-преобразованные неоднозначности удаляются для ГЛОНАСС. Результаты односистемной ГЛОНАСС хуже по сравнению с односистемной GPS, что можно объяснить меньшим количеством видимых спутников.
Таблица 2 Средние стандартные отклонения формальной неопределенности с плавающей запятой и стандартные отклонения фиксированного позиционирования для компонентов восток/север/вверх при одночастотных и двухчастотных наблюдениях неясности.Чтобы формально проанализировать возможности разрешения неоднозначности различных моделей, мы рассматриваем вероятность успеха IB и снижение точности неоднозначности (ADOP, Teunissen 1997), меру силы модели для успешного разрешения неоднозначности. Было обнаружено, что \(\mathrm{ADOP}\le 0,12\) обычно обеспечивает надежное разрешение неоднозначности ILS с частотой отказов менее \(0,1\%\) (Odijk and Teunissen 2008). Однако результаты горизонтального позиционирования на субсантиметровом уровне также должны быть возможны уже при использовании одночастотных данных ГЛОНАСС.Выигрыш комбинированной системы GPS + Galileo и GPS + ГЛОНАСС по сравнению только с GPS находится на аналогичном уровне, особенно с учетом меньшего количества спутников ГЛОНАСС. Даже для уже очень надежного четырехсистемного случая GPS + Galileo + BeiDou-2 + QZSS добавление данных ГЛОНАСС по-прежнему повышает точность. Средние показатели успешности IB на рис. 3 показывают, что односистемная одночастотная модель слишком слаба, чтобы поддерживать надежное разрешение неоднозначности, тогда как двухчастотная модель GPS или одночастотная GPS + Galileo достаточно надежна.{s}\) принимаются равными нулю. Двухчастотные результаты ясно показывают, что мы не можем рассчитывать на устранение всех неоднозначностей ГЛОНАСС. Даже при удалении двух наименее точных элементов показатели успеха IB все еще значительно ниже, чем для модели CDMA, результаты которой сопоставимы с GPS. Надежное разрешение двухчастотной неоднозначности ГЛОНАСС становится возможным только начиная примерно с восьми спутников. Показатели успеха IB одночастотной комбинированной модели GPS + ГЛОНАСС также ниже, чем у аналога GPS + Galileo.Средние значения ADOP подтверждают эти выводы на рис. 4, где черная линия указывает на ADOP 0,12 цикла. Рис. 3 Средние показатели успешности ИБ в зависимости от количества спутников для одночастотных (вверху) и двухчастотных (внизу) наблюдений
Рис. и двухчастотные (внизу) наблюдения. Черная линия отмечает 0,12 циклаМы не можем рассчитывать на надежное разрешение \(F\) наименее точных неоднозначностей для ГЛОНАСС, поэтому возникает вопрос, действительно ли они важны для позиционирования, и если да, то можем ли мы их использовать? Формальная точность с фиксированной неоднозначностью для случая GPS + ГЛОНАСС в таблице 3 действительно демонстрирует небольшое ухудшение средних стандартных отклонений при игнорировании этих неоднозначностей, хотя и на субмиллиметровом уровне.Оценка BIE приводит к максимально возможным значениям точности, которые могут быть фактически получены, так что применение BIE к полному набору неоднозначностей ГЛОНАСС показывает возможности модели. Сравнение этих результатов BIE с результатами сокращенного случая, в котором целочисленное свойство неоднозначностей \(F\) игнорируется, показывает потенциальную потерю сокращенного сценария. Для одночастотного случая есть небольшое преимущество при включении также этих неоднозначностей \(F\).
Таблица 3 Средняя точность позиционирования с фиксированной формальной неоднозначностью и смоделированной BIE для компонентов восток/север/вверх с одночастотными и двухчастотными наблюдениями Что еще более интересно, для более сильного двухчастотного случая, когда в среднем возможно позиционирование с точностью до сантиметра, результаты BIE для сокращенного и полного набора идентичны, а также идентичны для фиксированной точности с уменьшенным набором.Таким образом, стратегия удаления этих наименее точных неоднозначностей является очень разумной, поскольку даже при их оптимальном включении они не вносят заметного вклада в точность позиционирования. Для надежной целочисленной фиксации неоднозначностей ГЛОНАСС необходимо исключить эти элементы \(F\) (Теуниссен, 2019; Теуниссен и Ходабандех, 2019). С этого момента мы рассматриваем только этот сокращенный случай для ГЛОНАСС, так что коэффициенты успеха IB и значения ADOP относятся к этому случаю, а два метода FAR и DT PAR применяются к набору уменьшенной неоднозначности.То есть с данными ГЛОНАСС все рассмотренные методы являются, по сути, методами разрешения частичной неоднозначности .возможности разрешения неоднозначности, высокоточное позиционирование может быть возможным даже для кажущихся слабыми моделей при использовании методов на основе DT для FAR и PAR.
Таблица 4 Имитационная доступность точных оценок координат с формальной точностью 3 см для горизонтальных составляющих и 15 см для верхней составляющей в % ФАР считаются. Смоделированная средняя доступность оценок координат с формальной точностью 3 см или лучше для горизонтальных компонентов и 15 см для верхнего компонента приведена в таблице 4, где результаты DT FAR и DT PAR вычисляются путем интегрирования Монте-Карло. Как и ожидалось, одночастотная модель GPS слишком слаба для надежного разрешения неоднозначности, но двухчастотная модель достаточно сильна. Добавление данных ГЛОНАСС значительно улучшает одночастотные результаты, где методы на основе DT снова явно превосходят схему IB FAR.Однако для двухчастотного случая мы видим, что добавление ГЛОНАСС может даже ухудшить характеристики разрешения неоднозначности, особенно для IB FAR, тогда как с DT PAR можно ожидать полной доступности. То же самое наблюдается и для самой сильной четырехсистемной модели, где добавление данных ГЛОНАСС при попытке FAR снижает доступность, тогда как DT PAR снова может гарантировать полную доступность. Было показано, что автономная ГЛОНАСС слишком слаба для мгновенного позиционирования с надежным разрешением неоднозначности. На рис. 5 показаны результаты двухчастотного дальнего обзора IB при объединении трех последовательных эпох. Когда модель достаточно надежна, чтобы можно было принять целочисленное решение, возможны результаты сантиметрового уровня. Рис. 5 Двухчастотные ГЛОНАСС только ошибки позиционирования для CUT0-CUTA с использованием трех последовательных эпох измерения с IB FAR. Синим и серым цветом показаны принятые и отклоненные целочисленные решения
Преимущество интеграции данных ГЛОНАСС FDMA в решение с несколькими ГНСС показано на рис.6 для одночастотного позиционирования GPS + ГЛОНАСС. С IB FAR надежное разрешение неоднозначности только для GPS невозможно, а DT PAR позволяет получать результаты только на сантиметровом уровне для очень ограниченного числа эпох. В комбинированной модели, как и предсказывалось моделированием, степень приемлемости IB FAR явно выше, хотя все еще ограничена, а DT PAR еще больше повышает доступность точных результатов.
Рис. 6Одночастотные ошибки позиционирования GPS + ГЛОНАСС для CUT0-CUTA с IB FAR и DT PAR.Синий и серый цвет указывают на то, что все неоднозначности исправлены, а двусмысленности нет; для ФАР возможны все оттенки между ними
Результаты одночастотного четырех-/пятисистемного анализа с GPS, Galileo, BeiDou-2, QZSS и ГЛОНАСС показаны на рис. возможно с IB FAR в каждую эпоху. Добавление ГЛОНАСС уменьшает силу разрешения неоднозначности модели системы, что приводит к некоторым пробелам, в которых целочисленное решение не может быть принято с IB FAR, и мы получаем ошибки на уровне счетчика.Однако этих пробелов можно избежать с помощью DT PAR. Среднеквадратичные (СКЗ) ошибки позиционирования без ГЛОНАСС и IB FAR составляют 1,6, 1,4 и 3,7 мм для восточной, северной и верхней составляющих. Они немного уменьшены до 1,5, 1,4 и 3,5 мм с ГЛОНАСС и DT PAR, так что возможности позиционирования по-прежнему выигрывают от добавления ГЛОНАСС, хотя не всегда разрешается полный набор неоднозначностей.
Рис. 7Одночастотные ошибки позиционирования GPS + Galileo + BeiDou-2 + QZSS + ГЛОНАСС для CUT0-CUTA с IB FAR и DT PAR.Синий и серый цвет указывают на то, что все неоднозначности исправлены, а двусмысленности нет; для ФАР возможны все оттенки между ними
Почти идентичные результаты получены для двухчастотного случая с GPS и ГЛОНАСС на рис. 8, где ГЛОНАСС уменьшает среднеквадратичные ошибки с 2,1, 2,2 и 5,3 мм до 1,7, 1,8 и 4,3 мм. Проблема отвергнутых решений целочисленной неоднозначности с интегрированными данными ГЛОНАСС и IB FAR также остается при добавлении дополнительных созвездий к этому двухчастотному случаю, даже с пятью системами (здесь не показаны).
Рис. 8Двухчастотные одноэпоховые ошибки позиционирования GPS + ГЛОНАСС для CUT0-CUTA с IB FAR и DT PAR. Синий и серый цвет указывают на то, что все неоднозначности исправлены, а двусмысленности нет; для PAR возможны все оттенки между ними
ГЛОНАСС — только FDMA+CDMA RTK: производительность и перспективы
В этом разделе анализируются краткосрочные характеристики RTK текущего (август 2020 г.
) созвездия ГЛОНАСС на основе FDMA и комбинированных сигналов FDMA+CDMA . При этом мы рассматриваем две станции BUR2 и RHPT из Австралийской региональной сети GNSS (ARGN), которые расположены в Тасмании и вместе образуют базовую линию из примерно 4.3 км. В таблице 2 приведены сведения о типах приемников и антенн этих станций. Наш анализ основан на 30-секундных данных ГЛОНАСС L1, L2 и L3, собранных с отсечкой высоты 10° в дни года (DOY) 222–229 2020 года. Причина использования восьмидневных данных заключается в том, что наземный трек созвездие ГЛОНАСС повторяется каждые восемь звездных суток. Используемые типы наблюдения: C1C/L1C, C2C/L2C и C3Q/L3Q. В качестве зависящих от частоты стандартных отклонений недифференцированных кодовых и фазовых сигналов, отнесенных к зениту, мы принимаем$$ \begin{array}{*{20}c} \sigma_{p_{1} } = 34\,{\ text{см}},\sigma_{p_{2}} = 21 \,{\text{см}},\sigma_{p_{3}} = 14\,{\text{см}} \\ \sigma_{ \varphi_{1}} = 2 \,{\text{мм}},\sigma_{\varphi_{2}} = 2\,{\text{мм}},\sigma_{\varphi_{3}} = 2 \,{\text{мм}} \\ \end{массив} $$
(12)
Таблица 2 Типы приемников и антенн станций, использованных для обработкиДля достижения вышеуказанных значений мы применили метод оценки компонента дисперсии методом наименьших квадратов (Teunissen and Amiri-Simkooei 2008; Amiri-Simkooei et al.
2009 г.) к данным ГЛОНАСС, собранным в DOY 214–221 2020 г., при условии, что зависимость данных ГЛОНАСС от высоты спутника фиксируется посредством (4).Обратите внимание, что решения FDMA+CDMA могут быть получены из (5) только тогда, когда по крайней мере два передающих спутника CDMA видны одновременно. Поэтому в течение рассматриваемого восьмисуточного периода используются эпохи, в которые видны не менее двух передающих спутников ГЛОНАСС CDMA \(\left( {n \ge 2} \right)\). Таким образом, у нас будет одинаковое количество выборок решений FDMA и FDMA+CDMA, что позволит провести справедливое сравнение между двумя сценариями.{ — 1} } \right]} } \right),\), во время которого позиционирование становится почти невозможным. Чтобы исключить эти экстремальные значения, мы учитываем различные пороги PDOP при представлении результатов RTK, то есть PDOP < 50, PDOP < 30 и PDOP < 10, которые составляют 98,5%, 97,7% и 93% восьмидневного периода. , соответственно.
FDMA (L1) и FDMA+CDMA (L1+L3): текущая производительность
Сначала мы сравним производительность RTK сигналов L1 с производительностью сигналов L1+L3.
Одновременные результаты позиционирования и разрешения неоднозначности приведены в таблице 3 для различных порогов PDOP.В этой таблице перечислены средние показатели успешности целочисленной начальной загрузки за одну эпоху и стандартные отклонения базовых решений с плавающей запятой для сценариев FDMA (L1) и FDMA+CDMA (L1+L3). Формальный коэффициент успеха получается из среднего значения всех показателей успеха для одной эпохи, в то время как эмпирический показатель успеха вычисляется как количество эпох с правильно зафиксированными неоднозначностями, деленное на общее количество эпох. Формальные и эмпирические стандартные отклонения рассчитываются на основе соответствующих формальных и эмпирических матриц дисперсии.Формальная матрица дисперсии получается из среднего значения всех матриц дисперсии за одну эпоху, тогда как эмпирическая матрица дисперсии получается из ошибок оценки базовой линии за одну эпоху. Поскольку процент успешных решений как для FDMA (L1), так и для FDMA+CDMA (L1+L3) очень мал, статистика фиксированных решений не представлена в Таблице 3. Обратите внимание, что хотя проценты успешных разрешений неоднозначности представлены для различных PDOP пороговые значения, производительность разрешения неоднозначности не характеризуется через PDOP (Zaminpardaz et al.\цирк\). Под каждым столбцом приведены три значения, которые слева направо соответствуют порогам PDOP 50, 30 и 10. Результаты позиционирования с порогом PDOP 10 дополнительно визуализированы на рис. Панель на этом рисунке показывает, что за рассматриваемый период времени общее количество видимых спутников колеблется от четырех до девяти, причем от двух до пяти из них способны передавать сигналы CDMA. На двух нижних панелях рис. 1, соответственно, показаны временные ряды L1 и L1+L3 ошибки оценки базового компонента Up (компоненты North и East показывают аналогичное поведение).Ошибки оценки вычисляются путем вычитания истинности базовой линии из базовых оценок. Серым цветом показаны плавающие решения неоднозначности, красным цветом показаны решения с фиксированной неоднозначностью, если они зафиксированы неправильно, и зеленым цветом, если они установлены правильно, а также формальный доверительный интервал 95% (синие линии) решений с плавающей запятой.
Рис. 1 Корректность решений целочисленной неоднозначности одной эпохи определялась путем сравнения с решением целочисленной неоднозначности, определенным по данным всего периода.Текущее по состоянию на август 2020 г. мгновенное разрешение неоднозначности ГЛОНАСС для FDMA (L1) по сравнению с FDMA+CDMA (L1+L3). [Вверху] Количество отслеживаемых спутников ГЛОНАСС: общее количество спутников выделено черным цветом, спутников, передающих CDMA, выделено серым цветом; [Средний] Ошибка позиционирования FDMA (L1) в направлении вверх; [Внизу] Ошибка позиционирования FDMA+CDMA (L1+L3) в направлении вверх. На двух нижних панелях решения с плавающей запятой выделены серым цветом, правильно фиксированные решения — зеленым, а неправильно фиксированные решения — красным.Синие линии указывают на формальный доверительный интервал 95%, основанный на стандартном отклонении плавающего вверх. Эти результаты соответствуют значениям PDOP меньше 10
. Как видно из таблицы 3 и рисунка 1, добавление сигналов CDMA L3 к сигналам FDMA L1 может повысить точность решения с плавающей запятой почти в 1,3 раза.
Успешное разрешение неоднозначности L1 невозможно мгновенно. Включение сигналов CDMA улучшает характеристики разрешения неоднозначности, тем самым уменьшая количество неправильно зафиксированных базовых решений.Однако этого улучшения недостаточно, чтобы гарантировать успешное мгновенное разрешение неоднозначности с текущим созвездием. Это указывает на то, что потребуется несколько эпох, чтобы иметь высокие показатели успеха только для ГЛОНАСС. В таблице 4 приведены средние формальные показатели успешности для нескольких эпох, соответствующие различному количеству эпох с использованием сигналов FDMA (L1) и FDMA+CDMA (L1+L3) как для статических пользователей (базовый уровень является постоянным во времени), так и для кинематических пользователей (базовый уровень не связан). во время). Замечено, что включение сигналов L3 повышает вероятность успеха в нескольких эпохах, особенно когда используется небольшое количество эпох.По мере увеличения количества эпох модель FDMA становится сильнее, поэтому при добавлении сигналов CDMA наблюдается меньшее улучшение процента успешных попыток. \ circ \) FDMA (L1) по сравнению с FDMA + CDMA (L1 + L3): будущее performance
В рамках продолжающейся модернизации системы ГЛОНАСС скоро будут доступны сигналы CDMA со всех спутников группировки ГЛОНАСС.Чтобы получить представление о том, что такое созвездие принесет с точки зрения производительности разрешения неоднозначности, здесь мы проводим формальный анализ ADOP и коэффициента успеха с целочисленной начальной загрузкой, предполагая, что все спутники ГЛОНАСС передают сигналы CDMA на уровне L3. На рисунке 2 показаны соответствующие результаты разрешения неоднозначности для одной эпохи в эпохи с PDOP меньше 10. На верхней панели показано общее количество спутников за рассматриваемый период времени. Доля успешности устранения неоднозначности с начальной загрузкой на средней панели показывает, как успешность разрешения неоднозначности зависит от количества отслеживаемых спутников и как она улучшается при добавлении сигналов CDMA L3 к сигналам FDMA L1.Эти характеристики также отражаются в поведении ADOP, как показано на нижней панели.
Рис. 2 При добавлении сигналов L3 к сигналам L1 средний показатель успеха за восемь дней увеличивается с 0,005 до 0,859. Для периодов, когда доступно минимум шесть спутников (m > 5), что составляет 54% показанных выборок, средний показатель успешности L1 + L3 увеличивается до 0,99.Будущее мгновенное разрешение неоднозначности ГЛОНАСС для FDMA (L1) по сравнению с FDMA+CDMA (L1+L3). [Вверху] Количество отслеживаемых спутников ГЛОНАСС; [Посередине] Коэффициент успеха при целочисленной начальной загрузке: FDMA (L1) — красный, FDMA+CDMA (L1+L3) — зеленый; [Внизу] ADOP: FDMA (L1) — красным, FDMA+CDMA (L1+L3) — зеленым.Эти результаты соответствуют значениям PDOP менее 10
FDMA (L1+L2) по сравнению с FDMA+CDMA (L1+L2+L3): текущая производительность
Здесь мы сравниваем производительность RTK сигналов L1+L2 с L1+L2+L3 сигналы. Соответствующие средние эмпирические и формальные стандартные отклонения за одну эпоху для решений с плавающей запятой и фиксированной базовой линии, а также средние показатели успеха с целочисленной начальной загрузкой за одну эпоху приведены в таблице 5 для различных порогов PDOP.
\ круг \).В каждом столбце приведены три значения, которые слева направо соответствуют пороговым значениям PDOP, равным 50, 30 и 10. На рис. 3 показана та же информация, что и на рис. +L3 сигналы. Плотность красных и зеленых точек на двух нижних панелях хорошо согласуется с количеством видимых спутников. Количество красных точек уменьшается в периоды с более видимыми спутниками. Глядя на результаты FDMA на средней панели, мы отмечаем большие ошибки в правильно зафиксированных решениях (зеленые точки) на некоторых эпохах.В эти эпохи, в основном с четырьмя видимыми спутниками ГЛОНАСС, фиксированные стандартные отклонения очень близки к их плавающим аналогам. Это означает, что компонент Up имеет низкую корреляцию с фиксированными неоднозначностями с плавающей запятой, таким образом, получая небольшое преимущество от разрешения целочисленной неоднозначности. При включении данных CDMA корреляция между компонентом Up и подлежащими разрешению плавающими неоднозначностями увеличивается, что объясняет отсутствие больших ошибок в правильно фиксированных решениях FDMA+CDMA.
Рис. 3Текущее (на август 2020 г.) мгновенное разрешение неоднозначности ГЛОНАСС: FDMA (L1+L2) в сравнении с FDMA+CDMA (L1+L2+L3). [Вверху] Количество отслеживаемых спутников ГЛОНАСС: общее количество спутников выделено черным цветом, спутников, передающих CDMA, выделено серым цветом; [Средний] Ошибка позиционирования FDMA (L1+L2) в направлении вверх; [Внизу] Ошибка позиционирования FDMA+CDMA (L1+L2+L3) в направлении вверх. На двух нижних панелях решения с плавающей запятой выделены серым цветом, правильно фиксированные решения — зеленым, а неправильно фиксированные решения — красным.Синие линии указывают на формальный доверительный интервал 95%, основанный на стандартном отклонении плавающего вверх. Эти результаты соответствуют значениям PDOP менее 10
. Сравнение таблиц 3 и 5 показывает, что включение сигналов L2 в модели FDMA и FDMA+CDMA значительно улучшает как разрешение неоднозначности, так и производительность позиционирования.
Однако мгновенная вероятность успеха L1+L2+L3 все еще недостаточно высока (≈0,7). Эту проблему можно решить, объединив данные ГЛОНАСС за несколько эпох. В таблице 6 показаны средние формальные показатели успешности для нескольких эпох, соответствующие различному количеству эпох с использованием сигналов FDMA (L1+L2) и FDMA+CDMA (L1+L2+L3) как для статических, так и для кинематических пользователей.\circ \) FDMA(L1+L2) по сравнению с FDMA+CDMA (L1+L2+L3): производительность в будущем.
Здесь мы продолжаем наше предыдущее сравнение L1+L2 и L1+L2+L3, но теперь для будущего ГЛОНАСС, когда все его спутники будут передавать сигналы CDMA на L3. На рис. 4 сверху вниз показаны временные ряды числа видимых спутников, коэффициент успешных бутстрапов для одной эпохи и ADOP для одной эпохи в эпохи с PDOP менее 10. 0,460 до 0.948, когда сигналы L3 добавляются к сигналам L1+L2. Для периодов, когда доступно минимум 6 спутников (m > 5), что составляет 54 % показанных выборок, средний показатель успешности L1+L2+L3 увеличивается до 0,999.
Рис. 4Будущее мгновенное разрешение неоднозначности ГЛОНАСС: FDMA (L1+L2) по сравнению с FDMA+CDMA (L1+L2+L3). [Вверху] Количество отслеживаемых спутников ГЛОНАСС; [Посередине] Целочисленная частота успешных бутстрапов: FDMA (L1+L2) — красным, FDMA+CDMA (L1+L2+L3) — зеленым; [Внизу] ADOP: FDMA (L1+L2) — красным, FDMA+CDMA (L1+L2+L3) — зеленым.Эти результаты соответствуют значениям PDOP меньше 10
Система: ГЛОНАСС в апреле, что пошло не так
Герхард Бейтлер, Рольф Дах, Урс Хугентоблер, Оливер Монтенбрук, Георг Вебер и Эльмар Брокманн
Что произошло: 1 апреля 2014 года, в 21:15 UTC, все спутники ГЛОНАСС начали передавать неправильные широковещательные сообщения (BM), о чем ранее сообщал GPS World . Положения спутников, полученные из этих BM, были ошибочными на ± 200 километров по каждой из трех координат x, y и z привязанной к Земле геоцентрической экваториальной системы координат.
Проблема исчезла через час (после двух ошибочных БМ) для двух спутников ГЛОНАСС; у других спутников проблема длилась гораздо дольше: до 10 часов. Примерно к 07:30 UTC 2 апреля «первоапрельская шутка» закончилась.Влияние на приемники GPS/ГЛОНАСС
По сути, можно выделить два класса приемников: использующие БМ ГЛОНАСС для сопровождения и не использующие их. Приемники первого класса «узнавали» о проблемах в режиме реального времени, потому что наблюдения GPS и ГЛОНАСС не приводили к последовательной оценке местоположения.В лучшем случае все затронутые наблюдения ГЛОНАСС были помечены (и удалены из дальнейшего рассмотрения), и позиционирование работало правильно с уменьшенным количеством спутников. В худшем случае приемники полностью переставали отслеживать спутники GPS и ГЛОНАСС. Приемники второго класса нормально отслеживали GPS и ГЛОНАСС. Проблемы с отслеживанием вызвали бурю негодования в сообществе пользователей комбинированных приемников GPS и ГЛОНАСС.
3 июня 2014 г. на 13-м заседании Конгресса СШАНациональный консультативный совет по космическому позиционированию, навигации и синхронизации (PNT) Герхард Бейтлер, представляющий авторов этой статьи, представил презентацию, включающую пример постоянной сети двухсистемных приемников GPS и ГЛОНАСС в Швейцарии и соседних странах, где около 40 процентов из примерно 60 приемников перестали отслеживать спутники ГЛОНАСС и GPS. Неисправные приемники пришлось сбросить вручную утром 2 апреля (подробнее см.: www.gps.gov/governance/advisory/meetings/2014-06/beutler1.pdf).
Событие с точки зрения IGS
На первый взгляд, мероприятие ГЛОНАСС 1 и 2 апреля не было событием для Международной службы GNSS (IGS). IGS представляет собой добровольную федерацию более чем 200 международных агентств, которые объединяют ресурсы и данные примерно 400 постоянных станций GPS и ГЛОНАСС для создания точных продуктов GPS и ГЛОНАСС.
Серии продуктов IGS, включая точные эфемериды GPS и ГЛОНАСС, генерировались, как обычно, до, во время и после события.
4 апреля быстрый анализ Урса Хугентоблера показал, что пострадали только БМ ГЛОНАСС; кодовые (псевдодальностные) и фазовые наблюдения ГЛОНАСС и поправки спутниковых часов ГЛОНАСС не были затронуты.На рис. 1 видно, что событие ГЛОНАСС началось одновременно для всех спутников (для стационарных приемников первые неправильные позиции рассчитаны на 21:00 UTC, исходя из BM с Time of Clock (ToC) на 21:15 UTC). Проблема была устранена для первых двух спутников (спутники ГЛОНАСС в орбитальных слотах 6 и 23) через час; последний спутник не был зафиксирован до 07:30 2 апреля (используя правильный БМ в 07:45).
Рис. 1. Затронутые широковещательные сообщения для каждого спутника ГЛОНАСС. Цвета обозначают разные плоскости орбит.
Более 60 процентов из более чем 200 комбинированных приемников GPS и ГЛОНАСС в сети IGS нормально отслеживали спутники ГЛОНАСС. Серьезные перебои в передаче данных (для ГЛОНАСС или даже для ГЛОНАСС и GPS) наблюдались менее чем у 40% приемников комбинированного созвездия.
Однако количество ГЛОНАСС-наблюдений, используемых в повседневной работе аналитических центров (АЦ) ИГС, сократилось лишь примерно на 10% 2 апреля (и еще в меньшей степени 1 апреля).Небольшое снижение объясняется тем, что пострадали только последние три и первые семь часов 1 и 2 апреля соответственно.Поскольку АС IGS не нуждаются в БМ (ни для GPS, ни для ГЛОНАСС), а могут использовать свои предсказанные орбиты, полученные из точных эфемерид предыдущих дней, количество хороших наблюдений все же было вполне достаточным для расчета точных орбит ГЛОНАСС. для 1 и 2 апреля практически на ожидаемом уровне точности.
Подробный анализ
Для дальнейшего изучения структуры проблемы в качестве псевдонаблюдений в процессе определения орбиты использовались положения спутников, полученные с помощью BM.Определение орбиты было успешным при анализе только «хороших» позиций (до 1 апреля 21:00 или после 2 апреля 07:30). Определение орбиты было успешным и при использовании только положений от «плохой» БМ.
Успешный означает, что среднеквадратическая (RMS) ошибка процесса определения орбиты составляла порядка 0,5 метра на координату спутника — ожидаемый порядок величины.Поскольку теперь известно, что плохие позиции спутников подчиняются законам орбитального движения, можно дополнительно исследовать природу различий между «хорошими» и «плохими» орбитальными позициями.Для этого ориентиром послужили точные ГЛОНАСС-орбиты Центра определения орбит IGS в Европейском аналитическом центре. Его орбитальные положения сравнивались в инерциальной системе координат (не вращающейся вместе с Землей) с ошибочными положениями, полученными из БМ, посредством ортогонального преобразования, где только три угла поворота вокруг осей x, y и z инерциальной экваториальной системы координат.
Таблица 1 показывает, что положения, полученные с помощью нормальной («хорошей») BM ГЛОНАСС, очень хорошо сравниваются с точными орбитами IGS.За исключением незначительного поворота вокруг оси z, получается нулевой поворот вокруг ортогональных осей в инерциальной системе координат.
Таблица 1. Вращение всей системы хороших орбитальных положений (1 апреля, 0:00 – 20:45 UTC) относительно точных опорных орбит IGS («хорошие» БМ) и вращение всей системы плохих орбитальных положений ( 1 апреля, 21:00 – 2 апреля, 07:00 UTC) относительно точных опорных орбит IGS («плохой» BM).
Таблица 1 также показывает, что «плохие» позиции были получены из эталонных позиций при повороте примерно на 0.5 градусов вокруг инерциальной оси x. СКО в 71 метр следует сравнивать со всем эффектом до 200 километров по координате. Однако сравнение этого среднеквадратичного значения в 71 метр со среднеквадратичным значением определения орбиты около 0,5 метра на координату также говорит о том, что «истинное» преобразование является более сложным, чем преобразование, представленное всего лишь серией из трех вращений.
Мы не стали дополнительно исследовать, как это более или менее последовательное вращение могло войти в БМ ГЛОНАСС. Вроде бы понятно, однако, что в реализации БМ ГЛОНАСС проскочила систематическая ошибка, которые активировались в общую для всех спутников опорную эпоху (но загружались на отдельные спутники в разное время).
Рисунок 1 свидетельствует о том, что операторы ГЛОНАСС практически сразу осознали проблему: уже через час первые два спутника начали передавать БМ с обычным уровнем точности.
Рисунок 1 также подтверждает идею о том, что проблема решалась по спутникам. Неверный расчет показал, что спутники находились над горизонтом, по крайней мере, одного из российских аплинков в момент переключения обратно на правильный БМ.
Резюме и выводы
Событие ГЛОНАСС можно было описать фразой «такого не может быть никогда.Для сообщества пользователей ситуация усугублялась тем, что о событии не сообщалось по официальному российскому каналу путем выпуска Уведомления для пользователей ГЛОНАСС (НАГУ). Это определенно должно было произойти в интересах прозрачности.
Приведенный выше анализ основан на информации, доступной через IGS. Он был исполнен через несколько недель после события. Однако стоит отметить, что информация, необходимая для анализа, была доступна в режиме реального времени.
Эталонная орбита, используемая в анализе, могла быть заменена предсказанными IGS орбитами, сгенерированными в сверхбыстрых сериях.Ввиду важности BM для всех пользователей и, в частности, для пользователей продуктов IGS, работающих в режиме реального времени, IGS может рассмотреть вопрос о мониторинге качества BM для всех GNSS.
Исправление ошибки ГЛОНАСС: репортаж из Москвы
В беседе с журналистами 23 мая Джавад Ашджаи, президент JAVAD GNSS, осудил недавний спор о станциях мониторинга на территории США и России, заявив, что он основан на дезинформации и неверных толкованиях, раздутых политическим кризисом.Он также представил иную точку зрения на отключение сигнала ГЛОНАСС, чем сообщалось в других СМИ.
«В начале апреля было предположение, что ГЛОНАСС потребовалось 11 часов, чтобы исправить программную ошибку, потому что именно столько времени потребовалось для того, чтобы все спутники пролетели над пунктом управления на территории России. Этого не было, я узнал из разговоров с их инженерами и с руководителем, отвечающим за все это.
Один инженер допустил ошибку и загрузил не то программное обеспечение.Пока они не смогли его найти и отладить — а на это у них ушло 11 часов — они не могли загрузить правильное программное обеспечение на спутники.«11-часовое отключение не было связано с ожиданием, пока все спутники пролетят над наземными станциями управления на территории России, чтобы получить свежую загрузку данных», — продолжил Ашджаи. «ГЛОНАСС имеет возможность, как и GPS, обновлять данные через межспутниковую связь. Задержка была вызвана тем, что потребовалось время, чтобы найти ошибку в загруженном ошибочном программном обеспечении и исправить ее.
Ashjaee обратился к разногласиям по поводу станции мониторинга, заявив, что Россия искала станции мониторинга ГЛОНАСС в Соединенных Штатах не для загрузки каких-либо данных, а для мониторинга спутников ГЛОНАСС, чтобы предоставить более точную информацию об орбите и часах для бесплатного блага всех пользователей.
Нажмите здесь, чтобы прочитать полное обсуждение Ашджаи разногласий по поводу американо-российских станций наблюдения.
Новости о ситуации смотрите на https://www.gpsworld.com/tag/russian-monitoring-stations/.Русский пуск
Одиночный спутник ГЛОНАСС-М был запущен с космодрома Плесецк 14 июня. ГЛОНАСС-М 55 (с обозначением 755, когда-то находившийся в эксплуатации, также известный как Космос 2500) был введен в плоскость 3 группировки и займет 21 орбитальную позицию.
ПроизводительРешетнев сообщил, что спутник оснащен экспериментальной полезной нагрузкой, способной передавать сигналы в диапазоне частот L3. Сигнал L3 с центральной частотой 1202,025 МГц является CDMA, в отличие от устаревших сигналов FDMA ГЛОНАСС.Эксперимент будет включать летные испытания новой аппаратуры и оценку ее точностных характеристик. Тестовый спутник ГЛОНАСС-К1 также передает сигнал L3.
Европейский космический симпозиум: Дайджест
По словам Пола Вайссенберга, заместителя генерального директора ЕС по предприятиям и промышленности,Copernicus, «младший брат Galileo», станет основным внедрением Galileo и других технологий GNSS в Европе.
Программа спутникового наблюдения Земли, управляемая Европейским космическим агентством для предоставления точной и своевременной информации для улучшения управления окружающей средой, понимания и смягчения последствий изменения климата и обеспечения гражданской безопасности. Copernicus ранее была известна как Глобальный мониторинг окружающей среды. и безопасности (GMES).Скольжение вправо. Galileo сделает «декларацию о начале обслуживания в первой половине следующего года», — сказал Матиас Пачке, директор программ спутниковой навигации ЕС. Похоже, что это немного отступает от предыдущей упорной решимости объявить услуги до конца 2014 года.
ЕК может предложить закон об обязательном использовании технологии GNSS в различных областях: как в случае с eCall, начиная с 2015 года, включая Galileo в приемниках внутри автомобилей, по словам Мариана-Жана Маринеску, члена Европарламента.
Питер Лардж из Trimble высказался против обязательного использования GNSS на любом рынке: «Плохой политический результат, который ведет к регионализации».
Подробный отчет см. в июньском электронном бюллетене GNSS Design & Test.
Ошибка позиционирования для GPS, ГЛОНАСС и GPS+ГЛОНАСС.
Контекст 1
… этот конкретный набор результатов, возможность получать и отслеживать двухчастотные данные ГЛОНАСС, как ожидается, станет более важной, поскольку мы приближаемся к следующему солнечному максимуму.5.5. Результаты GPS + ГЛОНАСС. В этом разделе результаты позиционирования, полученные с помощью комбинированного программного приемника GPS/ГЛОНАСС, сравниваются с результатами, полученными при использовании только GPS и ГЛОНАСС. Временные ряды ошибок для каждого решения показаны на рис. 13. Эти результаты получены с использованием набора данных, собранных 10 октября 2008 г. Как показано, решение, основанное на сочетании GPS и ГЛОНАСС, дает такие же результаты, что и решение, основанное только на GPS. Это возникает по двум основным причинам. Во-первых, видно больше спутников GPS, чем спутников ГЛОНАСС (семь против пяти).
Во-вторых, отклонения измерений GPS в C 3 NAVG 2 TM меньше, чем отклонения ГЛОНАСС из-за их более широкой полосы пропускания сигнала и улучшенных моделей орбиты (т.е. точности спутниковых координат). Таким образом, ожидается, что комбинированное решение будет очень близко к результатам, полученным только с помощью GPS. В таблице 10 показаны среднеквадратичные ошибки положения для трех решений. Согласно таблице северная и восточная ошибки наименьшие для комбинированного решения GPS и ГЛОНАСС. Однако решение только для GPS имеет наименьшую ошибку высоты.В целом, как обсуждалось выше, между одним GPS и решением GPS/ГЛОНАСС большой разницы нет. Следует отметить, что эти статистические данные рассчитываются всего за несколько минут (примерно три минуты) и поэтому могут иметь краткосрочные погрешности, которые будут усреднены за более длительные периоды. Поэтому ожидается, что результаты будут другими, если рассматривать более длинные наборы данных (например, один день или более), когда усредняются краткосрочные вариации ошибок измерений и геометрии спутников. Тем не менее, эти результаты показывают преимущества ГЛОНАСС даже в относительно благоприятных условиях эксплуатации. 6. ЗАКЛЮЧЕНИЕ. В этой статье описывается реализация двухчастотного программного приемника ГЛОНАСС, который также работает с сигналами GPS L1 C/A. После краткого рассмотрения структуры сигнала ГЛОНАСС и ее отличий от GPS были описаны необходимые изменения в программном приемнике GPS. С этой целью самое большое практическое различие связано с генерацией локальных сигналов в приемнике, который не может использовать преимущества улучшений эффективности, разработанных в приемниках только для GPS.Декодирование навигационного сообщения также отличается из-за другой стратегии кодирования, используемой в ГЛОНАСС. В программный приемник GSNRx TM Университета Калгари были внесены все необходимые модификации, необходимые для захвата и отслеживания сигналов ГЛОНАСС после миссии, и были собраны два набора данных для оценки производительности программного приемника. Первый тест использовался для оценки производительности решения по сбору, отслеживанию и навигации сигналов ГЛОНАСС. Что касается захвата и отслеживания сигналов, результаты показали, что все видимые сигналы могут быть обнаружены при условии, что их сигналы достаточно сильны.В частности, было показано, что значения C/N 0 , FLI и PLI дают удовлетворительные результаты. Полученное навигационное решение только для L1 оказалось сравнимым с коммерческим приемником и способным обеспечить метровую точность в одноточечном режиме. Сравнение решений только для L1 и только для L2 от программного приемника показало небольшое ухудшение решения для L2, что связано с более низким уровнем принимаемой мощности этого сигнала. Измерение псевдодальности без учета ионосферы также было выполнено с использованием двухчастотных данных, и было обнаружено, что оно дает немного худшее решение о местоположении из-за повышенного влияния шума и многолучевости.Тем не менее, возможность вычислить решение без учета ионосферы будет иметь важное значение, поскольку мы приближаемся к следующему солнечному максимуму. Второй набор данных использовался для оценки относительной производительности решений только для GPS, только для ГЛОНАСС и GPS/ГЛОНАСС. Как и ожидалось, двухсистемное решение дало наилучшие общие результаты. Однако следует отметить, что различия по сравнению с решением, основанным только на GPS, были относительно незначительными из-за большего количества спутников GPS, доступных во время испытаний, и большего веса, придаваемого данным GPS в программном обеспечении навигационного решения.В целом делается вывод, что программный приемник GPS/ГЛОНАСС действительно осуществим и полезен для улучшения характеристик позиционирования. В будущем разработанный программный приемник будет служить в качестве исследовательского инструмента для интеграции GPS/ГЛОНАСС. Кроме того, по мере запуска некоторых новых спутников ГЛОНАСС-К программное обеспечение приемника можно будет легко обновить для приема и отслеживания новых сигналов, которые станут …%PDF-1.5 % 265 0 объект > эндообъект 266 0 объект > /W [ 1 2 1 ] /Index [ 265 260 ] /Info 82 0 R /Root 267 0 R /Size 525 /Prev 2887423 /ID [] >> ручей xcbdg`b`8 $8Al $;AD$A,G !HpV Ss&Fǭ İ’XF #3P конечный поток эндообъект 267 0 объект > эндообъект 268 0 объект > ручей х͛А)’ Х ‘a{Z#8{nه@nӁjvOOkX|Ej.
Наверх
 Дрейф смещения — это изменение датчика во времени; дрейф смещения имеет случайный характер и поэтому должен моделироваться как стохастический процесс. Ошибка масштабного коэффициента представляет собой отношение изменения выходного сигнала датчика к изменению измеряемой физической величины.В идеальных условиях масштабный коэффициент должен быть равен единице. Эта ошибка имеет детерминированную природу, но обычно моделируется как случайный процесс. Ошибки инерциального датчика могут быть выражены в терминах случайного блуждания по углу (ARW) и случайного блуждания по скорости (VRW). Параметр ARW описывает среднее отклонение или ошибку, возникающую при интегрировании шума в выходной сигнал гироскопа. Точно так же определение параметра VRW основано на той же концепции для акселерометров.
Дрейф смещения — это изменение датчика во времени; дрейф смещения имеет случайный характер и поэтому должен моделироваться как стохастический процесс. Ошибка масштабного коэффициента представляет собой отношение изменения выходного сигнала датчика к изменению измеряемой физической величины.В идеальных условиях масштабный коэффициент должен быть равен единице. Эта ошибка имеет детерминированную природу, но обычно моделируется как случайный процесс. Ошибки инерциального датчика могут быть выражены в терминах случайного блуждания по углу (ARW) и случайного блуждания по скорости (VRW). Параметр ARW описывает среднее отклонение или ошибку, возникающую при интегрировании шума в выходной сигнал гироскопа. Точно так же определение параметра VRW основано на той же концепции для акселерометров. Отсюда видно, что смещение при включении МЭМС-гироскопа составляет около 5400 град/ч, в то время как у датчиков навигационного и тактического класса оно значительно меньше. Кроме того, смещение во время движения может составлять 1040 град/ч в датчиках MEMS, тогда как для тактического гироскопа оно составляет около 1 град/ч.Эти параметры обеспечивают хорошую оценку производительности МЭМС по сравнению с датчиками более высокого класса.
Отсюда видно, что смещение при включении МЭМС-гироскопа составляет около 5400 град/ч, в то время как у датчиков навигационного и тактического класса оно значительно меньше. Кроме того, смещение во время движения может составлять 1040 град/ч в датчиках MEMS, тогда как для тактического гироскопа оно составляет около 1 град/ч.Эти параметры обеспечивают хорошую оценку производительности МЭМС по сравнению с датчиками более высокого класса. 025
025 16e-06
16e-06 92
92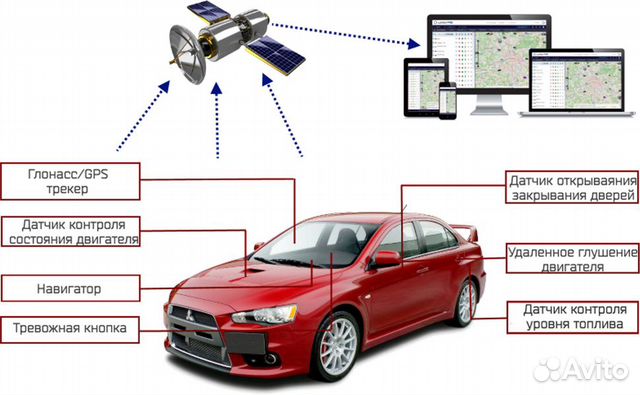
 В частности, ИНС более точна в краткосрочной перспективе, она может предоставлять данные с очень высокой скоростью, а также может предоставлять информацию об отношении.С другой стороны, GNSS более точна в долгосрочной перспективе, и ошибка практически не зависит от времени. В следующих разделах описываются два наиболее распространенных подхода к интеграции GNSS и инерциальных данных, а именно слабая и тесная связь.
В частности, ИНС более точна в краткосрочной перспективе, она может предоставлять данные с очень высокой скоростью, а также может предоставлять информацию об отношении.С другой стороны, GNSS более точна в долгосрочной перспективе, и ошибка практически не зависит от времени. В следующих разделах описываются два наиболее распространенных подхода к интеграции GNSS и инерциальных данных, а именно слабая и тесная связь.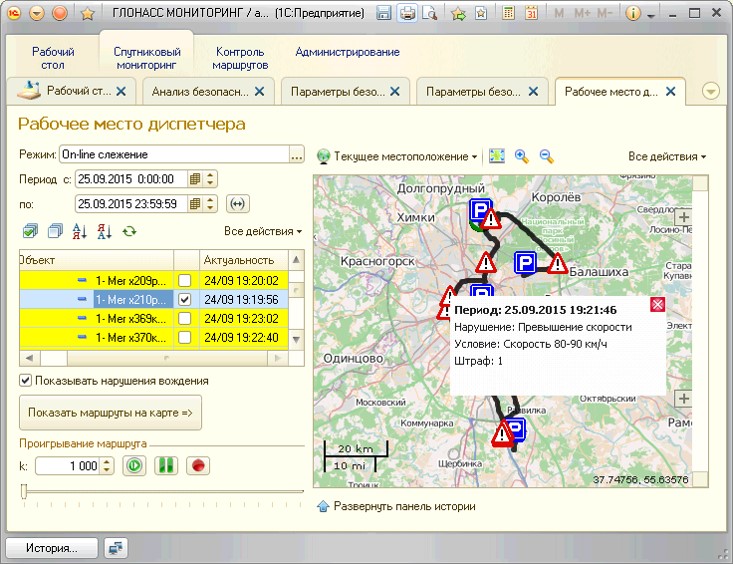

 0077
0077 Схема ТК показана на . Хотя этот подход является более сложным, он обычно обеспечивает лучшую производительность, поскольку обновления могут выполняться независимо от того, сколько спутников отслеживается.
Схема ТК показана на . Хотя этот подход является более сложным, он обычно обеспечивает лучшую производительность, поскольку обновления могут выполняться независимо от того, сколько спутников отслеживается.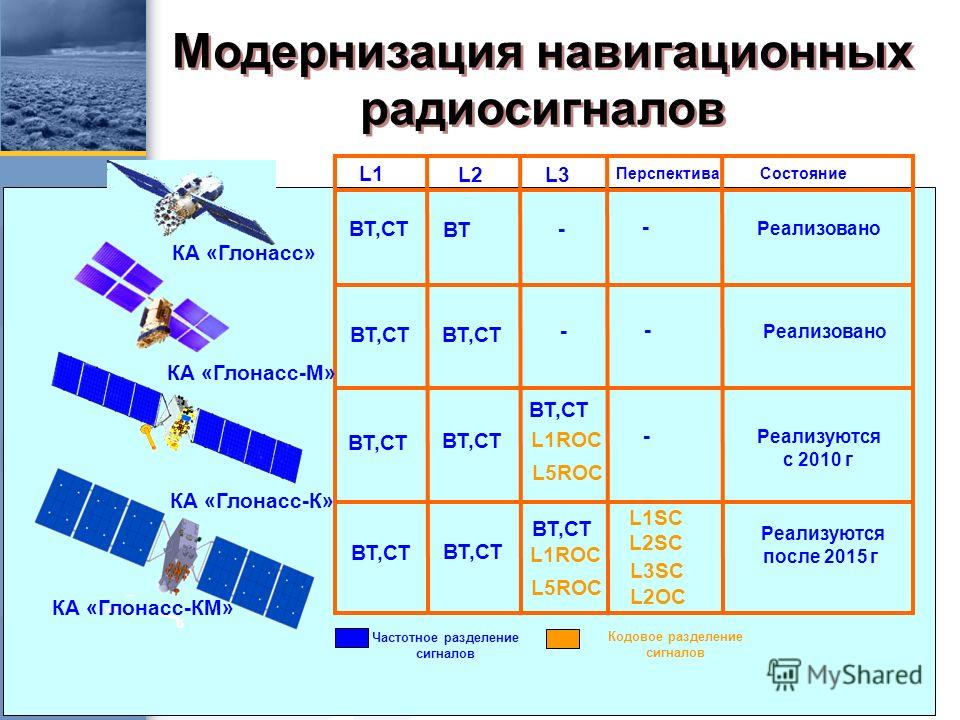 Конфигурация с замкнутым контуром необходима, когда ИНС с низкими характеристиками используется для уменьшения роста инерционной ошибки [6], что, в свою очередь, удовлетворяет допущениям о малом угле, используемым для вывода уравнений ошибки ИНС.
Конфигурация с замкнутым контуром необходима, когда ИНС с низкими характеристиками используется для уменьшения роста инерционной ошибки [6], что, в свою очередь, удовлетворяет допущениям о малом угле, используемым для вывода уравнений ошибки ИНС.
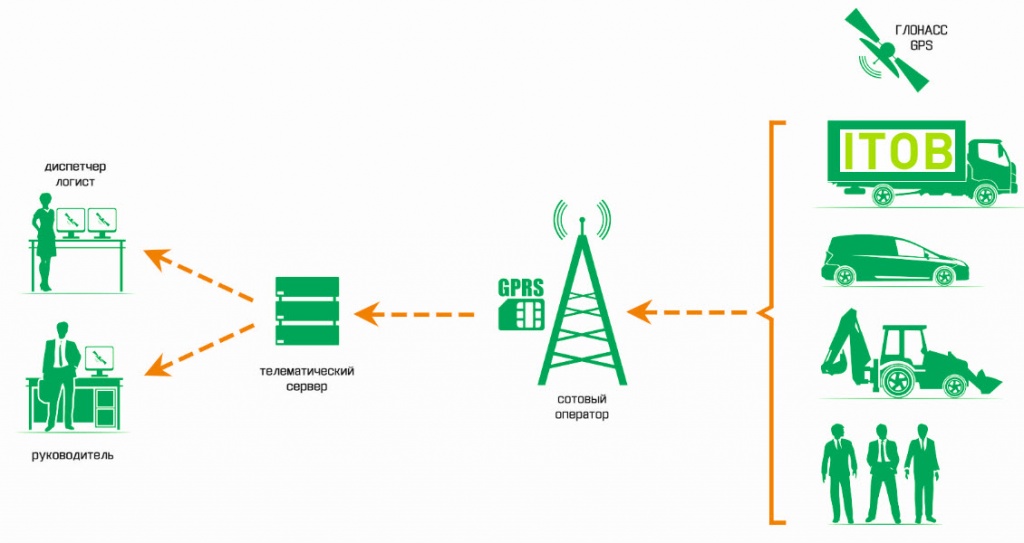 Последние необходимы, поскольку возможны небольшие перемещения в боковом и вертикальном направлениях.
Последние необходимы, поскольку возможны небольшие перемещения в боковом и вертикальном направлениях. Поскольку возможно, что каркас кузова наклонен относительно истинной вертикали (т.г., если автомобиль наклонен из-за неравномерного распределения веса), эти два ограничения, строго говоря, не эквивалентны.
Поскольку возможно, что каркас кузова наклонен относительно истинной вертикали (т.г., если автомобиль наклонен из-за неравномерного распределения веса), эти два ограничения, строго говоря, не эквивалентны. Общая продолжительность теста около 23 мин; скорость автомобиля варьировалась от 0 до 50 км/ч с частыми остановками из-за светофоров, а общее пройденное расстояние составило около 10 км.
Общая продолжительность теста около 23 мин; скорость автомобиля варьировалась от 0 до 50 км/ч с частыми остановками из-за светофоров, а общее пройденное расстояние составило около 10 км. Данные SPAN обрабатываются программным обеспечением NovAtel Inertial Explorer с использованием фазовых и доплеровских измерений в режиме двойной разности. Базовое расстояние (относительно базовой станции, расположенной в кампусе Университета Калгари) варьировалось в пределах 6–7 км.Точность эталонного решения в этих условиях представлена в . Все оборудование было размещено на крыше автомобиля, как показано на рисунке, а полный тест траектории показан на рисунке .
Данные SPAN обрабатываются программным обеспечением NovAtel Inertial Explorer с использованием фазовых и доплеровских измерений в режиме двойной разности. Базовое расстояние (относительно базовой станции, расположенной в кампусе Университета Калгари) варьировалось в пределах 6–7 км.Точность эталонного решения в этих условиях представлена в . Все оборудование было размещено на крыше автомобиля, как показано на рисунке, а полный тест траектории показан на рисунке .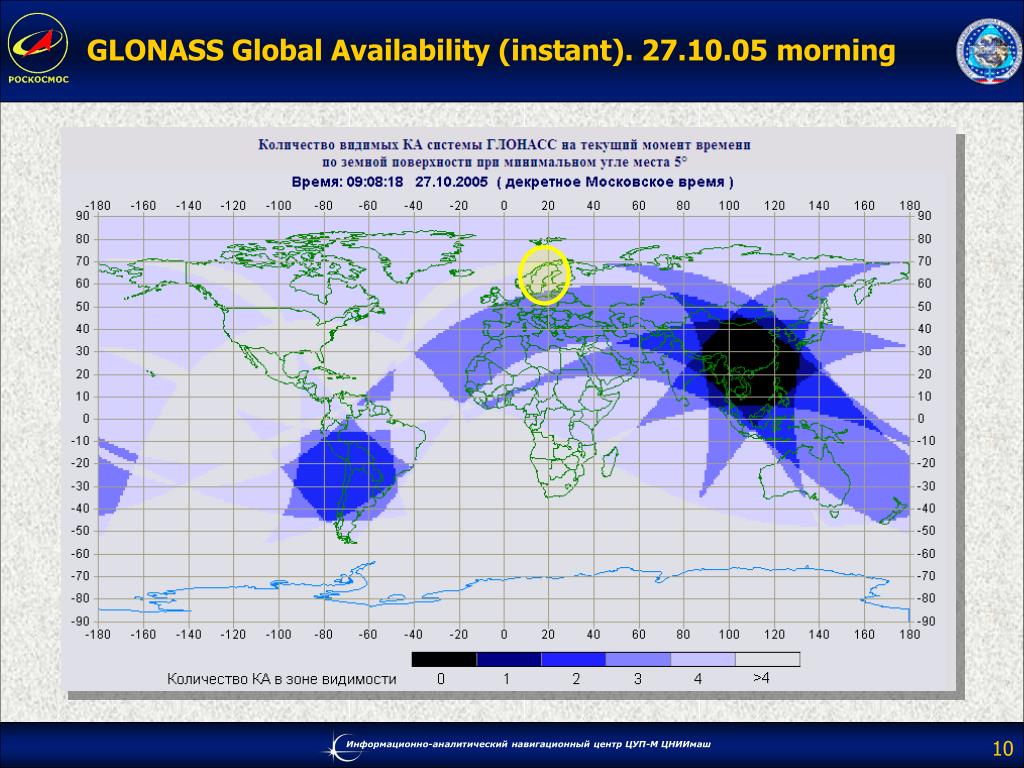 Видимость и поведение GDOP показаны на , где также выделены сегменты. Параметр GDOP представляет собой геометрический фактор, представляющий увеличение стандартного отклонения ошибок измерения на решение [21].
Видимость и поведение GDOP показаны на , где также выделены сегменты. Параметр GDOP представляет собой геометрический фактор, представляющий увеличение стандартного отклонения ошибок измерения на решение [21]. Вторая часть сегмента 1 находилась в требовательном городском каньоне с плохим спутниковым покрытием (0–6 доступных спутников GPS). Видимость спутника в случаях только GPS и GPS/ГЛОНАСС показана на . В случае использования только GPS очевидны частые частичные и полные отключения, особенно в восточном конце длинной восточно-западной части траектории и вдоль северно-южной части траектории (расположенной недалеко от центра города Калгари). Самый длинный период GPS, в течение которого автономное решение GPS недоступно (далее именуемый «сбой»), составляет около 60 с и выделен пунктирным кружком в верхней части .В случае с GPS/ГЛОНАСС этот период все еще в значительной степени присутствует, но сокращается за счет комбинированной фиксации GPS/ГЛОНАСС, как показано в нижней части .
Вторая часть сегмента 1 находилась в требовательном городском каньоне с плохим спутниковым покрытием (0–6 доступных спутников GPS). Видимость спутника в случаях только GPS и GPS/ГЛОНАСС показана на . В случае использования только GPS очевидны частые частичные и полные отключения, особенно в восточном конце длинной восточно-западной части траектории и вдоль северно-южной части траектории (расположенной недалеко от центра города Калгари). Самый длинный период GPS, в течение которого автономное решение GPS недоступно (далее именуемый «сбой»), составляет около 60 с и выделен пунктирным кружком в верхней части .В случае с GPS/ГЛОНАСС этот период все еще в значительной степени присутствует, но сокращается за счет комбинированной фиксации GPS/ГЛОНАСС, как показано в нижней части . Эти две части траектории соединяются поворотом в самой западной части центра города с достаточной видимостью для непрерывной фиксации GPS.Включение ГЛОНАСС (внизу) существенно не улучшает спутниковое покрытие на этом участке, что также показано на рис.
Эти две части траектории соединяются поворотом в самой западной части центра города с достаточной видимостью для непрерывной фиксации GPS.Включение ГЛОНАСС (внизу) существенно не улучшает спутниковое покрытие на этом участке, что также показано на рис. Стратегии слабой и тесной интеграции тестируются, чтобы определить, играет ли тип интеграции значительную роль. Псевдоизмерения, основанные на предположениях о типичном поведении транспортного средства, включены в обе архитектуры интеграции для оценки эффективности в этом контексте, как и наблюдения за рысканьем, полученные с помощью GNSS.
Стратегии слабой и тесной интеграции тестируются, чтобы определить, играет ли тип интеграции значительную роль. Псевдоизмерения, основанные на предположениях о типичном поведении транспортного средства, включены в обе архитектуры интеграции для оценки эффективности в этом контексте, как и наблюдения за рысканьем, полученные с помощью GNSS. Решение GPS/INS показывает большие ошибки во время вышеупомянутого самого продолжительного отключения GPS, при этом максимальные ошибки достигают около 400 м.Добавление ГЛОНАСС к этому решению показывает очевидные улучшения по сравнению с базовым случаем. На самом деле изолированная фиксация GPS/ГЛОНАСС (обведена кружком в правой части ) позволяет траектории оставаться относительно близкой к эталонной между вторым и третьим поворотами, тогда как без ГЛОНАСС возникают гораздо большие ошибки. Кроме того, конфигурация LC GG/INS обеспечивает более высокую производительность, чем решение только для GPS, на участке с востока на запад (около значений восточного направления 705 000), где ошибка LC GPS/INS имеет тенденцию к росту из-за коротких отключений только GPS (15–15 000). продолжительность 20 с).Наконец, траектория, полученная с помощью GPS/ГЛОНАСС/ИНС, дополненная данными о рыскании, полученными с помощью ГНСС, а также псевдоизмерениями скорости и высоты, показывает значительные улучшения по сравнению с другой конфигурацией с небольшими расхождениями с эталонной траекторией.
Решение GPS/INS показывает большие ошибки во время вышеупомянутого самого продолжительного отключения GPS, при этом максимальные ошибки достигают около 400 м.Добавление ГЛОНАСС к этому решению показывает очевидные улучшения по сравнению с базовым случаем. На самом деле изолированная фиксация GPS/ГЛОНАСС (обведена кружком в правой части ) позволяет траектории оставаться относительно близкой к эталонной между вторым и третьим поворотами, тогда как без ГЛОНАСС возникают гораздо большие ошибки. Кроме того, конфигурация LC GG/INS обеспечивает более высокую производительность, чем решение только для GPS, на участке с востока на запад (около значений восточного направления 705 000), где ошибка LC GPS/INS имеет тенденцию к росту из-за коротких отключений только GPS (15–15 000). продолжительность 20 с).Наконец, траектория, полученная с помощью GPS/ГЛОНАСС/ИНС, дополненная данными о рыскании, полученными с помощью ГНСС, а также псевдоизмерениями скорости и высоты, показывает значительные улучшения по сравнению с другой конфигурацией с небольшими расхождениями с эталонной траекторией. 4
4 0
0 9
9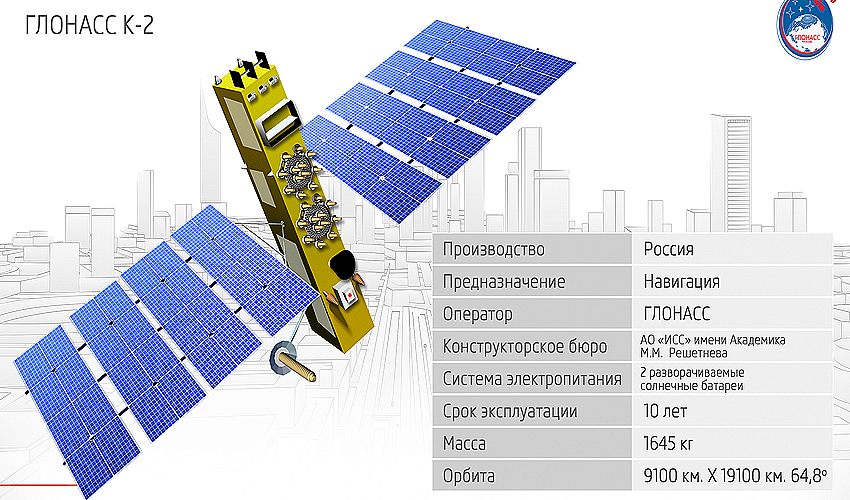 В этом случае, хотя включение наблюдений ГЛОНАСС по-прежнему дает лучшее общее решение, относительное улучшение меньше, чем в случае слабого интегрирования.Это снова связано с повышенной наблюдаемостью в результате тесной интеграции. Наконец, траектория, полученная также путем интегрирования помощи при рыскании и псевдонаблюдений за скоростью и высотой, показывает значительные улучшения по сравнению с другой конфигурацией TC, особенно в течение определенной выше критической зоны.
В этом случае, хотя включение наблюдений ГЛОНАСС по-прежнему дает лучшее общее решение, относительное улучшение меньше, чем в случае слабого интегрирования.Это снова связано с повышенной наблюдаемостью в результате тесной интеграции. Наконец, траектория, полученная также путем интегрирования помощи при рыскании и псевдонаблюдений за скоростью и высотой, показывает значительные улучшения по сравнению с другой конфигурацией TC, особенно в течение определенной выше критической зоны. 1
1 Решение GPS/INS не дает больших ошибок во время сбоев GPS, как в соответствующем случае LC, благодаря способности вычислять интегрированное положение в случае частичных сбоев GNSS. Несколько лучшая траектория получается при включении измерений ГЛОНАСС и рассмотренных ограничений.
Решение GPS/INS не дает больших ошибок во время сбоев GPS, как в соответствующем случае LC, благодаря способности вычислять интегрированное положение в случае частичных сбоев GNSS. Несколько лучшая траектория получается при включении измерений ГЛОНАСС и рассмотренных ограничений.


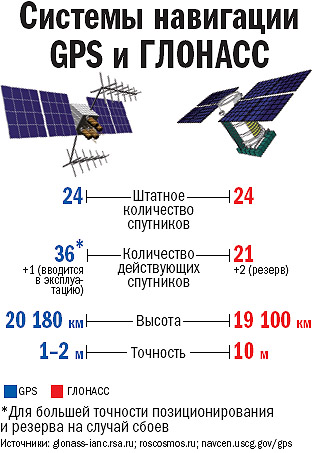
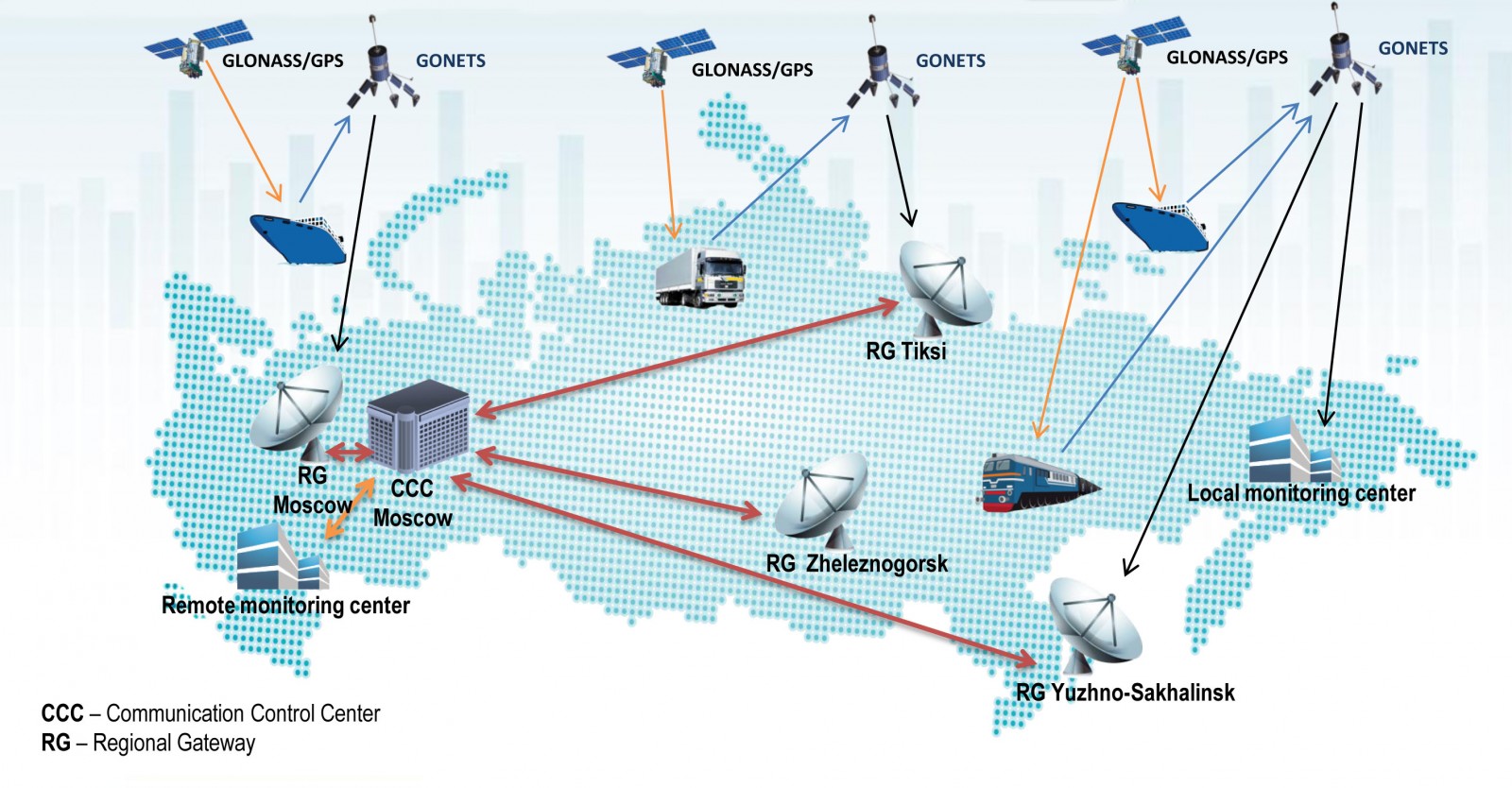 63
63 1
1 8
8 1
1 Однако в тесно связанной реализации ГЛОНАСС обеспечивает значительные улучшения. В этом отношении эти результаты аналогичны предыдущим результатам, полученным с системами GPS/INS.
Однако в тесно связанной реализации ГЛОНАСС обеспечивает значительные улучшения. В этом отношении эти результаты аналогичны предыдущим результатам, полученным с системами GPS/INS. Кроме того, в этом случае результаты между слабой и тесной интеграцией очень похожи, что еще больше стирает преимущества подхода с жесткой интеграцией.
Кроме того, в этом случае результаты между слабой и тесной интеграцией очень похожи, что еще больше стирает преимущества подхода с жесткой интеграцией. В: Уйт де Хааг М., Гебре-Эгзиабхер Д., Петовелло М.Г., редакторы. ION GPS Redbook Vol. VII Интегрированные системы.Институт навигации; Манассас, Вирджиния, США: 2010. стр. 206–214. [Google Академия]4. Хьюитсон С., Ван Дж. Расширенный автономный мониторинг целостности приемника (eRAIM) для интеграции GNSS/INS. Дж. Сурв. англ. 2010; 136:13–22. [Google Академия]5. Годха С. М. С. Тезис. Университет Калгари; Калгари, AB, Канада: 2006. Оценка производительности недорогого IMU DGPS на основе MEMS, интегрированного с DGPS для приложения навигации наземных транспортных средств. [Google Академия]6. Годха С., Кэннон М.Е. Интегрированная система GPS/MEMS INS для навигации в городских районах.GPS раствор. 2007; 11: 193–203. [Google Академия]7. Наяк Р.А. РС. Тезис. Университет Калгари; Калгари, AB, Канада: 2000. Надежная и непрерывная городская навигация с использованием нескольких GPS-антенн и недорогого IMU. [Google Академия]8. Шин Э., доктор философии. Тезис. Университет Калгари; Калгари, AB, Канада: 2005.
В: Уйт де Хааг М., Гебре-Эгзиабхер Д., Петовелло М.Г., редакторы. ION GPS Redbook Vol. VII Интегрированные системы.Институт навигации; Манассас, Вирджиния, США: 2010. стр. 206–214. [Google Академия]4. Хьюитсон С., Ван Дж. Расширенный автономный мониторинг целостности приемника (eRAIM) для интеграции GNSS/INS. Дж. Сурв. англ. 2010; 136:13–22. [Google Академия]5. Годха С. М. С. Тезис. Университет Калгари; Калгари, AB, Канада: 2006. Оценка производительности недорогого IMU DGPS на основе MEMS, интегрированного с DGPS для приложения навигации наземных транспортных средств. [Google Академия]6. Годха С., Кэннон М.Е. Интегрированная система GPS/MEMS INS для навигации в городских районах.GPS раствор. 2007; 11: 193–203. [Google Академия]7. Наяк Р.А. РС. Тезис. Университет Калгари; Калгари, AB, Канада: 2000. Надежная и непрерывная городская навигация с использованием нескольких GPS-антенн и недорогого IMU. [Google Академия]8. Шин Э., доктор философии. Тезис. Университет Калгари; Калгари, AB, Канада: 2005. Методы оценки для недорогой инерциальной навигации. [Google Академия]9. Мезенцев О. к.т.н. Тезис. Университет Калгари; Калгари, AB, Канада: 2005 г. Сенсорное обеспечение пешеходной навигации HSGPS.[Google Академия] 10. Абдель-Хамид В., доктор философии. Тезис. Университет Калгари; Калгари, AB, Канада: 2005. Повышение точности интегрированных систем MEMS-IMU/GPS для приложений навигации наземных транспортных средств. [Google Академия] 11. Сайед З., Аггарвал П., Янг Ю., Эль-Шейми Н. Улучшенная навигация транспортных средств с помощью тесно связанной интеграции. Материалы конференции IEEE по автомобильным технологиям, Марина-Бэй; Сингапур. май 2008 г.; стр. 3077–3081. [Google Академия] 12. Хан С., Ван Дж. Навигация на наземном транспортном средстве с интеграцией GPS и уменьшением производительности INS за счет увеличения скорости.Дж. Навиг. 2010;63:153–166. [Google Академия] 13. Лехнер В., Йеске Р., Виег С., Клюшников С. Интеграция GPS, ГЛОНАСС и ИНС на основе необработанных данных — первые результаты экспериментального исследования.
Методы оценки для недорогой инерциальной навигации. [Google Академия]9. Мезенцев О. к.т.н. Тезис. Университет Калгари; Калгари, AB, Канада: 2005 г. Сенсорное обеспечение пешеходной навигации HSGPS.[Google Академия] 10. Абдель-Хамид В., доктор философии. Тезис. Университет Калгари; Калгари, AB, Канада: 2005. Повышение точности интегрированных систем MEMS-IMU/GPS для приложений навигации наземных транспортных средств. [Google Академия] 11. Сайед З., Аггарвал П., Янг Ю., Эль-Шейми Н. Улучшенная навигация транспортных средств с помощью тесно связанной интеграции. Материалы конференции IEEE по автомобильным технологиям, Марина-Бэй; Сингапур. май 2008 г.; стр. 3077–3081. [Google Академия] 12. Хан С., Ван Дж. Навигация на наземном транспортном средстве с интеграцией GPS и уменьшением производительности INS за счет увеличения скорости.Дж. Навиг. 2010;63:153–166. [Google Академия] 13. Лехнер В., Йеске Р., Виег С., Клюшников С. Интеграция GPS, ГЛОНАСС и ИНС на основе необработанных данных — первые результаты экспериментального исследования. Материалы 48-го ежегодного собрания Института навигации; Дейтон, Огайо, США. июнь 1992 г.; стр. 351–358. [Google Академия] 14. Риннан А., Сигмонд М.Э., Робертсен А., Гундерсен Н. Квалификация гибридного решения GNSS и IMU. Материалы конференции по динамическому позиционированию; Хьюстон, Техас, США. Октябрь 2009 г.[Google Академия] 15. Суккарие С., к.т.н. Тезис. Сиднейский университет; Сидней, Австралия: 2000. Низкая стоимость, высокая надежность, вспомогательные инерциальные навигационные системы для автономных наземных транспортных средств. [Google Академия] 16. Шин Э. М. С. Тезис. Университет Калгари; Калгари, AB, Канада: 2001. Повышение точности недорогих INS/GPS для наземных приложений. [Google Академия] 17. Кляйн И., Филин С., Толедо Т. Псевдоизмерения в помощь ИНС при сбоях GPS. Навигация. 2010;57:25–34. [Google Академия] 18. Ангрисано А., Петовелло М.Г., Пульяно Г. Интеграция GNSS/INS в автомобильную городскую навигацию. Материалы 23-го Международного технического совещания отдела спутников Института навигации; Портленд, штат Орегон, США.
Материалы 48-го ежегодного собрания Института навигации; Дейтон, Огайо, США. июнь 1992 г.; стр. 351–358. [Google Академия] 14. Риннан А., Сигмонд М.Э., Робертсен А., Гундерсен Н. Квалификация гибридного решения GNSS и IMU. Материалы конференции по динамическому позиционированию; Хьюстон, Техас, США. Октябрь 2009 г.[Google Академия] 15. Суккарие С., к.т.н. Тезис. Сиднейский университет; Сидней, Австралия: 2000. Низкая стоимость, высокая надежность, вспомогательные инерциальные навигационные системы для автономных наземных транспортных средств. [Google Академия] 16. Шин Э. М. С. Тезис. Университет Калгари; Калгари, AB, Канада: 2001. Повышение точности недорогих INS/GPS для наземных приложений. [Google Академия] 17. Кляйн И., Филин С., Толедо Т. Псевдоизмерения в помощь ИНС при сбоях GPS. Навигация. 2010;57:25–34. [Google Академия] 18. Ангрисано А., Петовелло М.Г., Пульяно Г. Интеграция GNSS/INS в автомобильную городскую навигацию. Материалы 23-го Международного технического совещания отдела спутников Института навигации; Портленд, штат Орегон, США. сентябрь 2010 г.; стр. 1505–1512. [Google Академия] 19. Ангрисано А. к.т.н. Тезис. Университет Партенопы в Неаполе; Неаполь, Италия: 2010. Методы интеграции GNSS/INS. [Google Академия] 20. Вандер Кайлен Л., Лейссенс Дж., ван Меерберген Г. Использование приемника AsteRxi GNSS/MEMS IMU в системе позиционирования контейнеров.Труды симпозиума по местоположению и навигации; Индиан-Уэллс, Калифорния, США. Май 2010 г. [Google Scholar] 21. Каплан Е.Д., Лева Ю.Л. Основы спутниковой навигации. В: Каплан Э.Д., Хегарти С.Дж., редакторы. Понимание GPS: принципы и приложения. 2-е изд. Артек Хаус; Норвуд, Массачусетс, США: 2007. [Google Scholar]22. Мисра П., Пратт М., Берк Б. Расширение GPS/LAAS с помощью ГЛОНАСС: оценка эффективности. Материалы 11-го Международного технического совещания отдела спутников Института навигации; Нэшвилл, Теннесси, США.сентябрь 1998 г.; стр. 495–502. [Google Академия] 23. Гальоне С., Ангрисано А., Пульяно Г., Робустелли У., Сантамария Р., Вултаджио М. Стохастическая сигма-модель для псевдодальности спутника ГЛОНАСС.
сентябрь 2010 г.; стр. 1505–1512. [Google Академия] 19. Ангрисано А. к.т.н. Тезис. Университет Партенопы в Неаполе; Неаполь, Италия: 2010. Методы интеграции GNSS/INS. [Google Академия] 20. Вандер Кайлен Л., Лейссенс Дж., ван Меерберген Г. Использование приемника AsteRxi GNSS/MEMS IMU в системе позиционирования контейнеров.Труды симпозиума по местоположению и навигации; Индиан-Уэллс, Калифорния, США. Май 2010 г. [Google Scholar] 21. Каплан Е.Д., Лева Ю.Л. Основы спутниковой навигации. В: Каплан Э.Д., Хегарти С.Дж., редакторы. Понимание GPS: принципы и приложения. 2-е изд. Артек Хаус; Норвуд, Массачусетс, США: 2007. [Google Scholar]22. Мисра П., Пратт М., Берк Б. Расширение GPS/LAAS с помощью ГЛОНАСС: оценка эффективности. Материалы 11-го Международного технического совещания отдела спутников Института навигации; Нэшвилл, Теннесси, США.сентябрь 1998 г.; стр. 495–502. [Google Академия] 23. Гальоне С., Ангрисано А., Пульяно Г., Робустелли У., Сантамария Р., Вултаджио М. Стохастическая сигма-модель для псевдодальности спутника ГЛОНАСС. заявл. Геомат. 2011;3:49–57. [Google Академия] 24. Митрикас В.В., Ревнивых С.Г., Быханов Е.В. WGS84/PZ90 Определение параметров преобразования на основе лазерной и эфемеридной обработки долговременных орбитальных данных ГЛОНАСС. Материалы 11-го Международного технического совещания отдела спутников Института навигации; Нэшвилл, Теннесси, США.сентябрь 1998 г.; стр. 1625–1636. [Google Академия] 25. Чатфилд А. Основы высокоточной инерциальной навигации. АИАА Инк .; Вашингтон, округ Колумбия, США: 1997. [Google Scholar]26. Джекели С. Инерциальные навигационные системы с геодезическими приложениями. Вальтер де Грюйтер; Нью-Йорк, штат Нью-Йорк, США: 2000. [Google Scholar]27. Петовелло М.Г., Кэннон М.Е., Лашапель Г. Преимущества использования IMU тактического класса для высокоточного позиционирования. Навигация. 2004; 51:1–12. [Google Академия] 28. Спилкер Дж. Дж. Младший. Спутниковое созвездие и геометрическое ослабление точности.В: Паркинсон Б., Спилкер Дж.Дж. младший, редакторы. Глобальная система позиционирования: теория и приложения.
заявл. Геомат. 2011;3:49–57. [Google Академия] 24. Митрикас В.В., Ревнивых С.Г., Быханов Е.В. WGS84/PZ90 Определение параметров преобразования на основе лазерной и эфемеридной обработки долговременных орбитальных данных ГЛОНАСС. Материалы 11-го Международного технического совещания отдела спутников Института навигации; Нэшвилл, Теннесси, США.сентябрь 1998 г.; стр. 1625–1636. [Google Академия] 25. Чатфилд А. Основы высокоточной инерциальной навигации. АИАА Инк .; Вашингтон, округ Колумбия, США: 1997. [Google Scholar]26. Джекели С. Инерциальные навигационные системы с геодезическими приложениями. Вальтер де Грюйтер; Нью-Йорк, штат Нью-Йорк, США: 2000. [Google Scholar]27. Петовелло М.Г., Кэннон М.Е., Лашапель Г. Преимущества использования IMU тактического класса для высокоточного позиционирования. Навигация. 2004; 51:1–12. [Google Академия] 28. Спилкер Дж. Дж. Младший. Спутниковое созвездие и геометрическое ослабление точности.В: Паркинсон Б., Спилкер Дж.Дж. младший, редакторы. Глобальная система позиционирования: теория и приложения. Том. 1 АИАА Инк .; Вашингтон, округ Колумбия, США: 1996. [Google Scholar]
Том. 1 АИАА Инк .; Вашингтон, округ Колумбия, США: 1996. [Google Scholar] Однако результаты горизонтального позиционирования на субсантиметровом уровне также должны быть возможны уже при использовании одночастотных данных ГЛОНАСС.Выигрыш комбинированной системы GPS + Galileo и GPS + ГЛОНАСС по сравнению только с GPS находится на аналогичном уровне, особенно с учетом меньшего количества спутников ГЛОНАСС. Даже для уже очень надежного четырехсистемного случая GPS + Galileo + BeiDou-2 + QZSS добавление данных ГЛОНАСС по-прежнему повышает точность.
Однако результаты горизонтального позиционирования на субсантиметровом уровне также должны быть возможны уже при использовании одночастотных данных ГЛОНАСС.Выигрыш комбинированной системы GPS + Galileo и GPS + ГЛОНАСС по сравнению только с GPS находится на аналогичном уровне, особенно с учетом меньшего количества спутников ГЛОНАСС. Даже для уже очень надежного четырехсистемного случая GPS + Galileo + BeiDou-2 + QZSS добавление данных ГЛОНАСС по-прежнему повышает точность. Средние показатели успешности IB на рис. 3 показывают, что односистемная одночастотная модель слишком слаба, чтобы поддерживать надежное разрешение неоднозначности, тогда как двухчастотная модель GPS или одночастотная GPS + Galileo достаточно надежна.{s}\) принимаются равными нулю. Двухчастотные результаты ясно показывают, что мы не можем рассчитывать на устранение всех неоднозначностей ГЛОНАСС. Даже при удалении двух наименее точных элементов показатели успеха IB все еще значительно ниже, чем для модели CDMA, результаты которой сопоставимы с GPS. Надежное разрешение двухчастотной неоднозначности ГЛОНАСС становится возможным только начиная примерно с восьми спутников. Показатели успеха IB одночастотной комбинированной модели GPS + ГЛОНАСС также ниже, чем у аналога GPS + Galileo.Средние значения ADOP подтверждают эти выводы на рис. 4, где черная линия указывает на ADOP 0,12 цикла. Рис. 3
Средние показатели успешности IB на рис. 3 показывают, что односистемная одночастотная модель слишком слаба, чтобы поддерживать надежное разрешение неоднозначности, тогда как двухчастотная модель GPS или одночастотная GPS + Galileo достаточно надежна.{s}\) принимаются равными нулю. Двухчастотные результаты ясно показывают, что мы не можем рассчитывать на устранение всех неоднозначностей ГЛОНАСС. Даже при удалении двух наименее точных элементов показатели успеха IB все еще значительно ниже, чем для модели CDMA, результаты которой сопоставимы с GPS. Надежное разрешение двухчастотной неоднозначности ГЛОНАСС становится возможным только начиная примерно с восьми спутников. Показатели успеха IB одночастотной комбинированной модели GPS + ГЛОНАСС также ниже, чем у аналога GPS + Galileo.Средние значения ADOP подтверждают эти выводы на рис. 4, где черная линия указывает на ADOP 0,12 цикла. Рис. 3  и двухчастотные (внизу) наблюдения. Черная линия отмечает 0,12 цикла
и двухчастотные (внизу) наблюдения. Черная линия отмечает 0,12 цикла Что еще более интересно, для более сильного двухчастотного случая, когда в среднем возможно позиционирование с точностью до сантиметра, результаты BIE для сокращенного и полного набора идентичны, а также идентичны для фиксированной точности с уменьшенным набором.Таким образом, стратегия удаления этих наименее точных неоднозначностей является очень разумной, поскольку даже при их оптимальном включении они не вносят заметного вклада в точность позиционирования. Для надежной целочисленной фиксации неоднозначностей ГЛОНАСС необходимо исключить эти элементы \(F\) (Теуниссен, 2019; Теуниссен и Ходабандех, 2019). С этого момента мы рассматриваем только этот сокращенный случай для ГЛОНАСС, так что коэффициенты успеха IB и значения ADOP относятся к этому случаю, а два метода FAR и DT PAR применяются к набору уменьшенной неоднозначности.То есть с данными ГЛОНАСС все рассмотренные методы являются, по сути, методами разрешения частичной неоднозначности .
Что еще более интересно, для более сильного двухчастотного случая, когда в среднем возможно позиционирование с точностью до сантиметра, результаты BIE для сокращенного и полного набора идентичны, а также идентичны для фиксированной точности с уменьшенным набором.Таким образом, стратегия удаления этих наименее точных неоднозначностей является очень разумной, поскольку даже при их оптимальном включении они не вносят заметного вклада в точность позиционирования. Для надежной целочисленной фиксации неоднозначностей ГЛОНАСС необходимо исключить эти элементы \(F\) (Теуниссен, 2019; Теуниссен и Ходабандех, 2019). С этого момента мы рассматриваем только этот сокращенный случай для ГЛОНАСС, так что коэффициенты успеха IB и значения ADOP относятся к этому случаю, а два метода FAR и DT PAR применяются к набору уменьшенной неоднозначности.То есть с данными ГЛОНАСС все рассмотренные методы являются, по сути, методами разрешения частичной неоднозначности . Смоделированная средняя доступность оценок координат с формальной точностью 3 см или лучше для горизонтальных компонентов и 15 см для верхнего компонента приведена в таблице 4, где результаты DT FAR и DT PAR вычисляются путем интегрирования Монте-Карло. Как и ожидалось, одночастотная модель GPS слишком слаба для надежного разрешения неоднозначности, но двухчастотная модель достаточно сильна. Добавление данных ГЛОНАСС значительно улучшает одночастотные результаты, где методы на основе DT снова явно превосходят схему IB FAR.Однако для двухчастотного случая мы видим, что добавление ГЛОНАСС может даже ухудшить характеристики разрешения неоднозначности, особенно для IB FAR, тогда как с DT PAR можно ожидать полной доступности. То же самое наблюдается и для самой сильной четырехсистемной модели, где добавление данных ГЛОНАСС при попытке FAR снижает доступность, тогда как DT PAR снова может гарантировать полную доступность.
Смоделированная средняя доступность оценок координат с формальной точностью 3 см или лучше для горизонтальных компонентов и 15 см для верхнего компонента приведена в таблице 4, где результаты DT FAR и DT PAR вычисляются путем интегрирования Монте-Карло. Как и ожидалось, одночастотная модель GPS слишком слаба для надежного разрешения неоднозначности, но двухчастотная модель достаточно сильна. Добавление данных ГЛОНАСС значительно улучшает одночастотные результаты, где методы на основе DT снова явно превосходят схему IB FAR.Однако для двухчастотного случая мы видим, что добавление ГЛОНАСС может даже ухудшить характеристики разрешения неоднозначности, особенно для IB FAR, тогда как с DT PAR можно ожидать полной доступности. То же самое наблюдается и для самой сильной четырехсистемной модели, где добавление данных ГЛОНАСС при попытке FAR снижает доступность, тогда как DT PAR снова может гарантировать полную доступность. Было показано, что автономная ГЛОНАСС слишком слаба для мгновенного позиционирования с надежным разрешением неоднозначности. На рис. 5 показаны результаты двухчастотного дальнего обзора IB при объединении трех последовательных эпох. Когда модель достаточно надежна, чтобы можно было принять целочисленное решение, возможны результаты сантиметрового уровня. Рис. 5
Было показано, что автономная ГЛОНАСС слишком слаба для мгновенного позиционирования с надежным разрешением неоднозначности. На рис. 5 показаны результаты двухчастотного дальнего обзора IB при объединении трех последовательных эпох. Когда модель достаточно надежна, чтобы можно было принять целочисленное решение, возможны результаты сантиметрового уровня. Рис. 5 
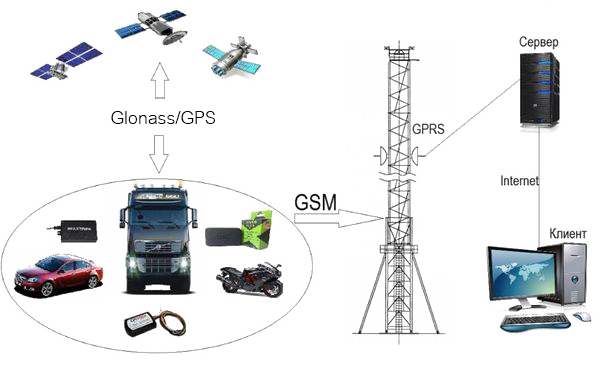
 ) созвездия ГЛОНАСС на основе FDMA и комбинированных сигналов FDMA+CDMA . При этом мы рассматриваем две станции BUR2 и RHPT из Австралийской региональной сети GNSS (ARGN), которые расположены в Тасмании и вместе образуют базовую линию из примерно 4.3 км. В таблице 2 приведены сведения о типах приемников и антенн этих станций. Наш анализ основан на 30-секундных данных ГЛОНАСС L1, L2 и L3, собранных с отсечкой высоты 10° в дни года (DOY) 222–229 2020 года. Причина использования восьмидневных данных заключается в том, что наземный трек созвездие ГЛОНАСС повторяется каждые восемь звездных суток. Используемые типы наблюдения: C1C/L1C, C2C/L2C и C3Q/L3Q. В качестве зависящих от частоты стандартных отклонений недифференцированных кодовых и фазовых сигналов, отнесенных к зениту, мы принимаем
) созвездия ГЛОНАСС на основе FDMA и комбинированных сигналов FDMA+CDMA . При этом мы рассматриваем две станции BUR2 и RHPT из Австралийской региональной сети GNSS (ARGN), которые расположены в Тасмании и вместе образуют базовую линию из примерно 4.3 км. В таблице 2 приведены сведения о типах приемников и антенн этих станций. Наш анализ основан на 30-секундных данных ГЛОНАСС L1, L2 и L3, собранных с отсечкой высоты 10° в дни года (DOY) 222–229 2020 года. Причина использования восьмидневных данных заключается в том, что наземный трек созвездие ГЛОНАСС повторяется каждые восемь звездных суток. Используемые типы наблюдения: C1C/L1C, C2C/L2C и C3Q/L3Q. В качестве зависящих от частоты стандартных отклонений недифференцированных кодовых и фазовых сигналов, отнесенных к зениту, мы принимаем 2009 г.) к данным ГЛОНАСС, собранным в DOY 214–221 2020 г., при условии, что зависимость данных ГЛОНАСС от высоты спутника фиксируется посредством (4).
2009 г.) к данным ГЛОНАСС, собранным в DOY 214–221 2020 г., при условии, что зависимость данных ГЛОНАСС от высоты спутника фиксируется посредством (4).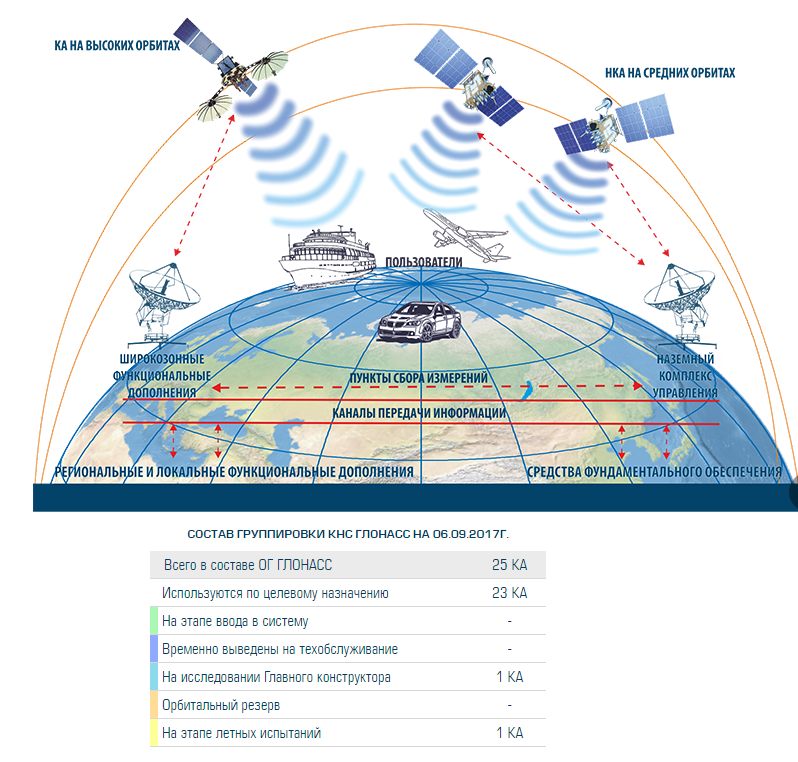 Одновременные результаты позиционирования и разрешения неоднозначности приведены в таблице 3 для различных порогов PDOP.В этой таблице перечислены средние показатели успешности целочисленной начальной загрузки за одну эпоху и стандартные отклонения базовых решений с плавающей запятой для сценариев FDMA (L1) и FDMA+CDMA (L1+L3). Формальный коэффициент успеха получается из среднего значения всех показателей успеха для одной эпохи, в то время как эмпирический показатель успеха вычисляется как количество эпох с правильно зафиксированными неоднозначностями, деленное на общее количество эпох. Формальные и эмпирические стандартные отклонения рассчитываются на основе соответствующих формальных и эмпирических матриц дисперсии.Формальная матрица дисперсии получается из среднего значения всех матриц дисперсии за одну эпоху, тогда как эмпирическая матрица дисперсии получается из ошибок оценки базовой линии за одну эпоху. Поскольку процент успешных решений как для FDMA (L1), так и для FDMA+CDMA (L1+L3) очень мал, статистика фиксированных решений не представлена в Таблице 3.
Одновременные результаты позиционирования и разрешения неоднозначности приведены в таблице 3 для различных порогов PDOP.В этой таблице перечислены средние показатели успешности целочисленной начальной загрузки за одну эпоху и стандартные отклонения базовых решений с плавающей запятой для сценариев FDMA (L1) и FDMA+CDMA (L1+L3). Формальный коэффициент успеха получается из среднего значения всех показателей успеха для одной эпохи, в то время как эмпирический показатель успеха вычисляется как количество эпох с правильно зафиксированными неоднозначностями, деленное на общее количество эпох. Формальные и эмпирические стандартные отклонения рассчитываются на основе соответствующих формальных и эмпирических матриц дисперсии.Формальная матрица дисперсии получается из среднего значения всех матриц дисперсии за одну эпоху, тогда как эмпирическая матрица дисперсии получается из ошибок оценки базовой линии за одну эпоху. Поскольку процент успешных решений как для FDMA (L1), так и для FDMA+CDMA (L1+L3) очень мал, статистика фиксированных решений не представлена в Таблице 3. Обратите внимание, что хотя проценты успешных разрешений неоднозначности представлены для различных PDOP пороговые значения, производительность разрешения неоднозначности не характеризуется через PDOP (Zaminpardaz et al.\цирк\). Под каждым столбцом приведены три значения, которые слева направо соответствуют порогам PDOP 50, 30 и 10.
Обратите внимание, что хотя проценты успешных разрешений неоднозначности представлены для различных PDOP пороговые значения, производительность разрешения неоднозначности не характеризуется через PDOP (Zaminpardaz et al.\цирк\). Под каждым столбцом приведены три значения, которые слева направо соответствуют порогам PDOP 50, 30 и 10.  Корректность решений целочисленной неоднозначности одной эпохи определялась путем сравнения с решением целочисленной неоднозначности, определенным по данным всего периода.
Корректность решений целочисленной неоднозначности одной эпохи определялась путем сравнения с решением целочисленной неоднозначности, определенным по данным всего периода. Успешное разрешение неоднозначности L1 невозможно мгновенно. Включение сигналов CDMA улучшает характеристики разрешения неоднозначности, тем самым уменьшая количество неправильно зафиксированных базовых решений.Однако этого улучшения недостаточно, чтобы гарантировать успешное мгновенное разрешение неоднозначности с текущим созвездием. Это указывает на то, что потребуется несколько эпох, чтобы иметь высокие показатели успеха только для ГЛОНАСС. В таблице 4 приведены средние формальные показатели успешности для нескольких эпох, соответствующие различному количеству эпох с использованием сигналов FDMA (L1) и FDMA+CDMA (L1+L3) как для статических пользователей (базовый уровень является постоянным во времени), так и для кинематических пользователей (базовый уровень не связан). во время). Замечено, что включение сигналов L3 повышает вероятность успеха в нескольких эпохах, особенно когда используется небольшое количество эпох.По мере увеличения количества эпох модель FDMA становится сильнее, поэтому при добавлении сигналов CDMA наблюдается меньшее улучшение процента успешных попыток.
Успешное разрешение неоднозначности L1 невозможно мгновенно. Включение сигналов CDMA улучшает характеристики разрешения неоднозначности, тем самым уменьшая количество неправильно зафиксированных базовых решений.Однако этого улучшения недостаточно, чтобы гарантировать успешное мгновенное разрешение неоднозначности с текущим созвездием. Это указывает на то, что потребуется несколько эпох, чтобы иметь высокие показатели успеха только для ГЛОНАСС. В таблице 4 приведены средние формальные показатели успешности для нескольких эпох, соответствующие различному количеству эпох с использованием сигналов FDMA (L1) и FDMA+CDMA (L1+L3) как для статических пользователей (базовый уровень является постоянным во времени), так и для кинематических пользователей (базовый уровень не связан). во время). Замечено, что включение сигналов L3 повышает вероятность успеха в нескольких эпохах, особенно когда используется небольшое количество эпох.По мере увеличения количества эпох модель FDMA становится сильнее, поэтому при добавлении сигналов CDMA наблюдается меньшее улучшение процента успешных попыток. \ circ \)
\ circ \)  При добавлении сигналов L3 к сигналам L1 средний показатель успеха за восемь дней увеличивается с 0,005 до 0,859. Для периодов, когда доступно минимум шесть спутников (m > 5), что составляет 54% показанных выборок, средний показатель успешности L1 + L3 увеличивается до 0,99.
При добавлении сигналов L3 к сигналам L1 средний показатель успеха за восемь дней увеличивается с 0,005 до 0,859. Для периодов, когда доступно минимум шесть спутников (m > 5), что составляет 54% показанных выборок, средний показатель успешности L1 + L3 увеличивается до 0,99. \ круг \).В каждом столбце приведены три значения, которые слева направо соответствуют пороговым значениям PDOP, равным 50, 30 и 10.
\ круг \).В каждом столбце приведены три значения, которые слева направо соответствуют пороговым значениям PDOP, равным 50, 30 и 10. 
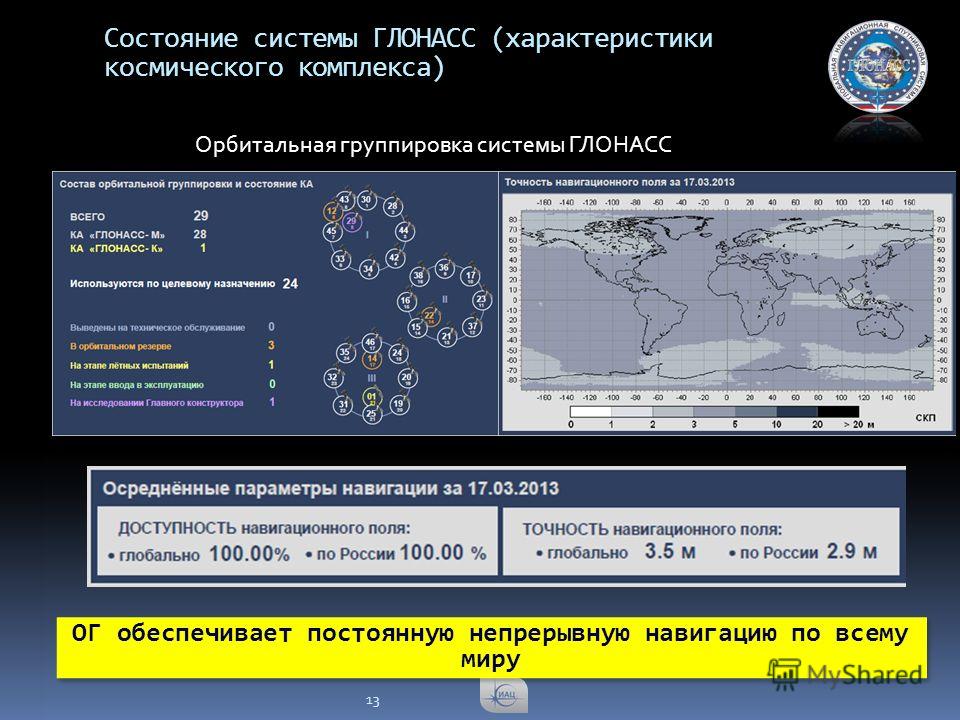 Однако мгновенная вероятность успеха L1+L2+L3 все еще недостаточно высока (≈0,7). Эту проблему можно решить, объединив данные ГЛОНАСС за несколько эпох. В таблице 6 показаны средние формальные показатели успешности для нескольких эпох, соответствующие различному количеству эпох с использованием сигналов FDMA (L1+L2) и FDMA+CDMA (L1+L2+L3) как для статических, так и для кинематических пользователей.\circ \)
Однако мгновенная вероятность успеха L1+L2+L3 все еще недостаточно высока (≈0,7). Эту проблему можно решить, объединив данные ГЛОНАСС за несколько эпох. В таблице 6 показаны средние формальные показатели успешности для нескольких эпох, соответствующие различному количеству эпох с использованием сигналов FDMA (L1+L2) и FDMA+CDMA (L1+L2+L3) как для статических, так и для кинематических пользователей.\circ \) 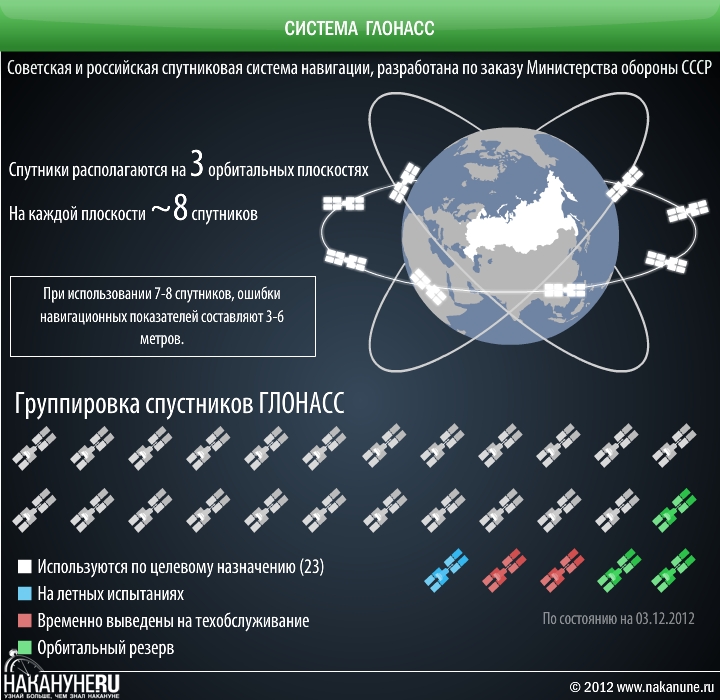
 Проблема исчезла через час (после двух ошибочных БМ) для двух спутников ГЛОНАСС; у других спутников проблема длилась гораздо дольше: до 10 часов. Примерно к 07:30 UTC 2 апреля «первоапрельская шутка» закончилась.
Проблема исчезла через час (после двух ошибочных БМ) для двух спутников ГЛОНАСС; у других спутников проблема длилась гораздо дольше: до 10 часов. Примерно к 07:30 UTC 2 апреля «первоапрельская шутка» закончилась. 4 апреля быстрый анализ Урса Хугентоблера показал, что пострадали только БМ ГЛОНАСС; кодовые (псевдодальностные) и фазовые наблюдения ГЛОНАСС и поправки спутниковых часов ГЛОНАСС не были затронуты.
4 апреля быстрый анализ Урса Хугентоблера показал, что пострадали только БМ ГЛОНАСС; кодовые (псевдодальностные) и фазовые наблюдения ГЛОНАСС и поправки спутниковых часов ГЛОНАСС не были затронуты. Однако количество ГЛОНАСС-наблюдений, используемых в повседневной работе аналитических центров (АЦ) ИГС, сократилось лишь примерно на 10% 2 апреля (и еще в меньшей степени 1 апреля).Небольшое снижение объясняется тем, что пострадали только последние три и первые семь часов 1 и 2 апреля соответственно.
Однако количество ГЛОНАСС-наблюдений, используемых в повседневной работе аналитических центров (АЦ) ИГС, сократилось лишь примерно на 10% 2 апреля (и еще в меньшей степени 1 апреля).Небольшое снижение объясняется тем, что пострадали только последние три и первые семь часов 1 и 2 апреля соответственно. Успешный означает, что среднеквадратическая (RMS) ошибка процесса определения орбиты составляла порядка 0,5 метра на координату спутника — ожидаемый порядок величины.
Успешный означает, что среднеквадратическая (RMS) ошибка процесса определения орбиты составляла порядка 0,5 метра на координату спутника — ожидаемый порядок величины.

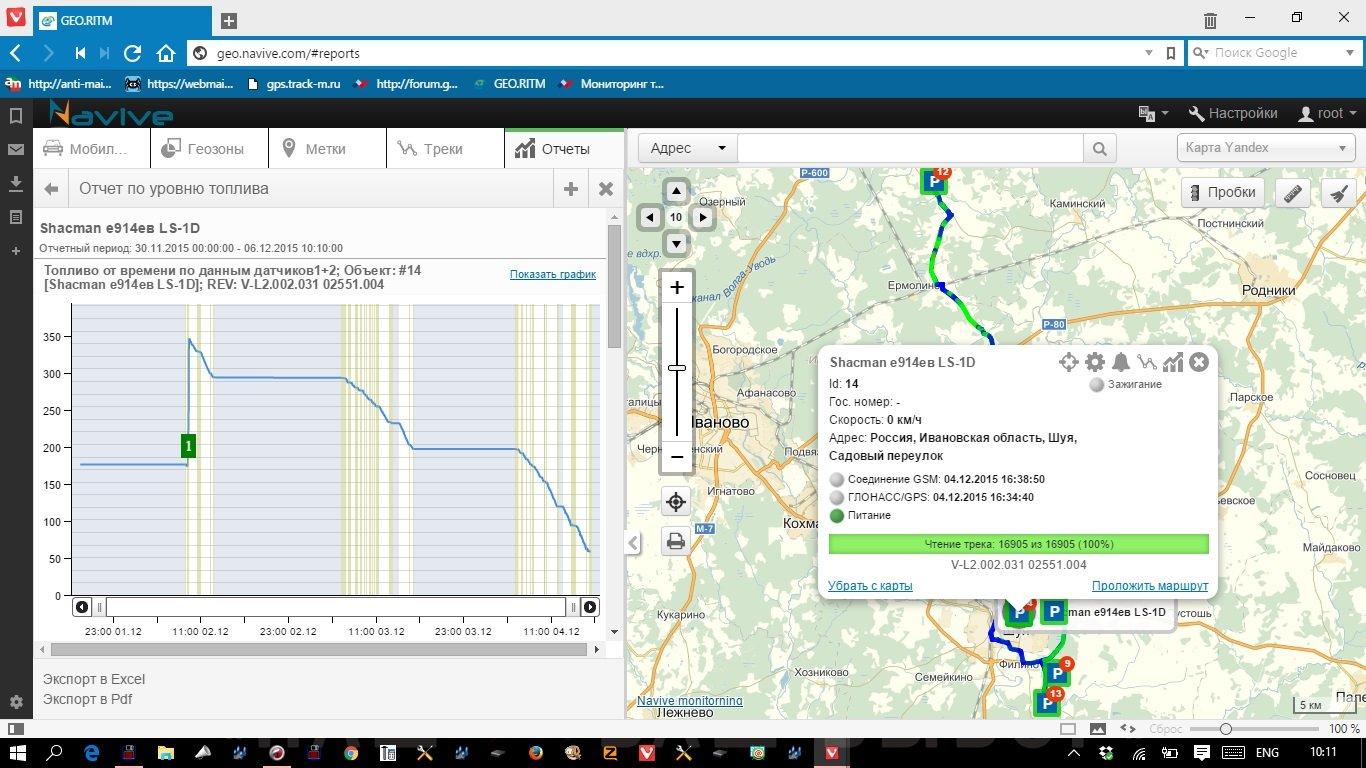 Эталонная орбита, используемая в анализе, могла быть заменена предсказанными IGS орбитами, сгенерированными в сверхбыстрых сериях.
Эталонная орбита, используемая в анализе, могла быть заменена предсказанными IGS орбитами, сгенерированными в сверхбыстрых сериях.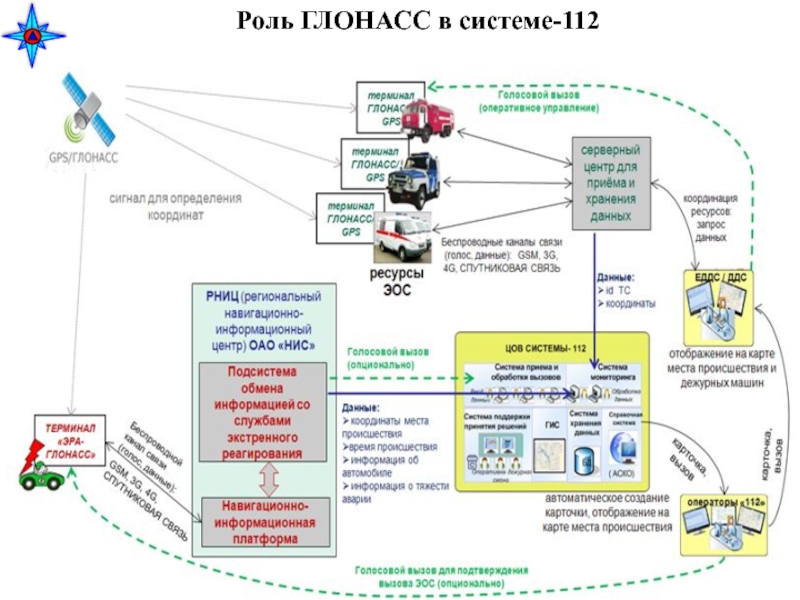 Один инженер допустил ошибку и загрузил не то программное обеспечение.Пока они не смогли его найти и отладить — а на это у них ушло 11 часов — они не могли загрузить правильное программное обеспечение на спутники.
Один инженер допустил ошибку и загрузил не то программное обеспечение.Пока они не смогли его найти и отладить — а на это у них ушло 11 часов — они не могли загрузить правильное программное обеспечение на спутники. Новости о ситуации смотрите на https://www.gpsworld.com/tag/russian-monitoring-stations/.
Новости о ситуации смотрите на https://www.gpsworld.com/tag/russian-monitoring-stations/.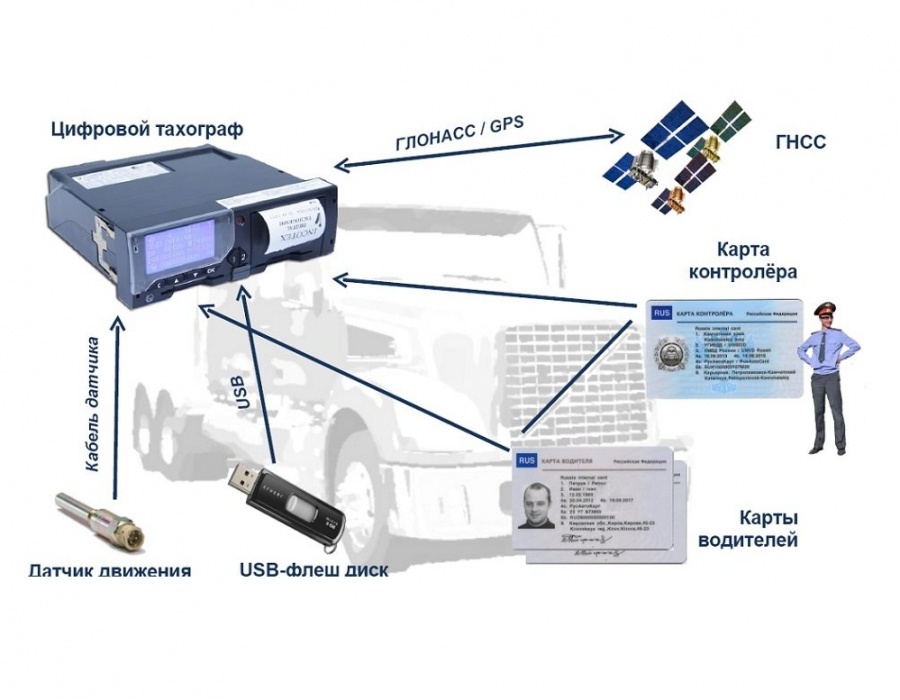 Программа спутникового наблюдения Земли, управляемая Европейским космическим агентством для предоставления точной и своевременной информации для улучшения управления окружающей средой, понимания и смягчения последствий изменения климата и обеспечения гражданской безопасности. Copernicus ранее была известна как Глобальный мониторинг окружающей среды. и безопасности (GMES).
Программа спутникового наблюдения Земли, управляемая Европейским космическим агентством для предоставления точной и своевременной информации для улучшения управления окружающей средой, понимания и смягчения последствий изменения климата и обеспечения гражданской безопасности. Copernicus ранее была известна как Глобальный мониторинг окружающей среды. и безопасности (GMES).
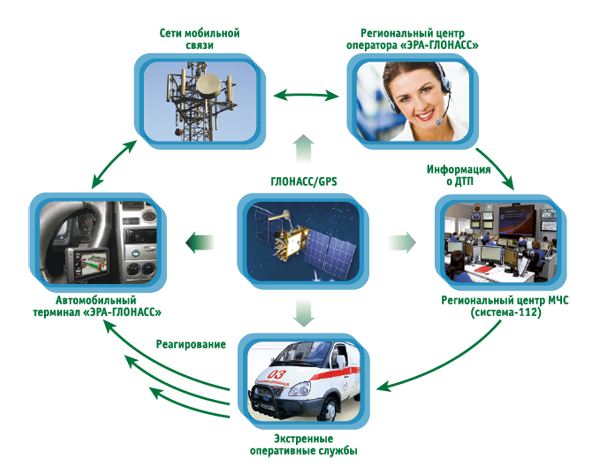 Тем не менее, эти результаты показывают преимущества ГЛОНАСС даже в относительно благоприятных условиях эксплуатации. 6. ЗАКЛЮЧЕНИЕ. В этой статье описывается реализация двухчастотного программного приемника ГЛОНАСС, который также работает с сигналами GPS L1 C/A. После краткого рассмотрения структуры сигнала ГЛОНАСС и ее отличий от GPS были описаны необходимые изменения в программном приемнике GPS. С этой целью самое большое практическое различие связано с генерацией локальных сигналов в приемнике, который не может использовать преимущества улучшений эффективности, разработанных в приемниках только для GPS.Декодирование навигационного сообщения также отличается из-за другой стратегии кодирования, используемой в ГЛОНАСС. В программный приемник GSNRx TM Университета Калгари были внесены все необходимые модификации, необходимые для захвата и отслеживания сигналов ГЛОНАСС после миссии, и были собраны два набора данных для оценки производительности программного приемника. Первый тест использовался для оценки производительности решения по сбору, отслеживанию и навигации сигналов ГЛОНАСС.
Тем не менее, эти результаты показывают преимущества ГЛОНАСС даже в относительно благоприятных условиях эксплуатации. 6. ЗАКЛЮЧЕНИЕ. В этой статье описывается реализация двухчастотного программного приемника ГЛОНАСС, который также работает с сигналами GPS L1 C/A. После краткого рассмотрения структуры сигнала ГЛОНАСС и ее отличий от GPS были описаны необходимые изменения в программном приемнике GPS. С этой целью самое большое практическое различие связано с генерацией локальных сигналов в приемнике, который не может использовать преимущества улучшений эффективности, разработанных в приемниках только для GPS.Декодирование навигационного сообщения также отличается из-за другой стратегии кодирования, используемой в ГЛОНАСС. В программный приемник GSNRx TM Университета Калгари были внесены все необходимые модификации, необходимые для захвата и отслеживания сигналов ГЛОНАСС после миссии, и были собраны два набора данных для оценки производительности программного приемника. Первый тест использовался для оценки производительности решения по сбору, отслеживанию и навигации сигналов ГЛОНАСС.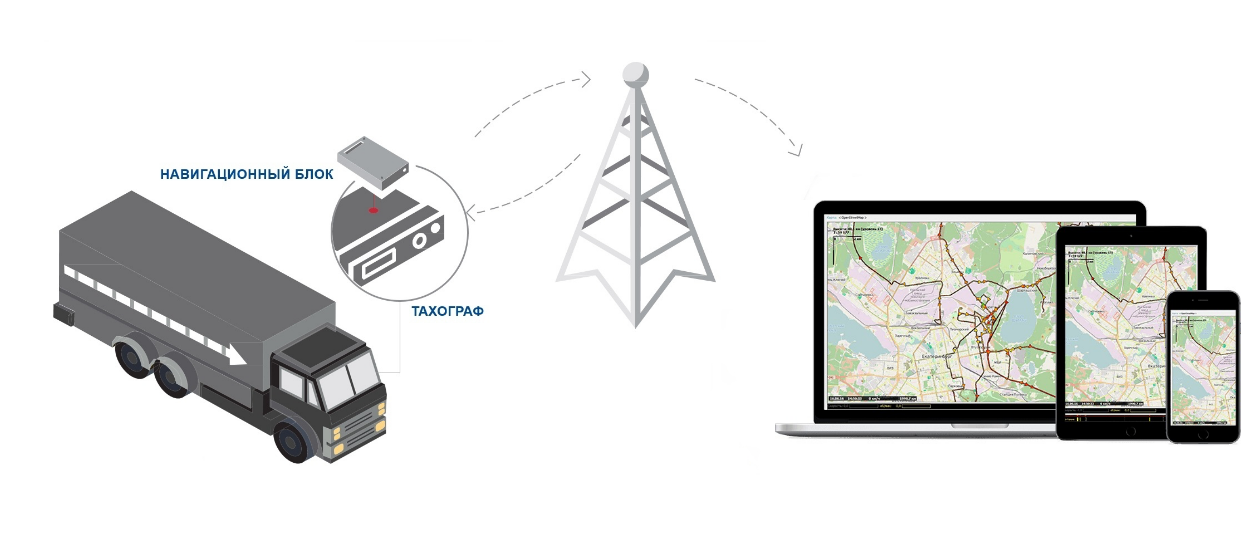 Что касается захвата и отслеживания сигналов, результаты показали, что все видимые сигналы могут быть обнаружены при условии, что их сигналы достаточно сильны.В частности, было показано, что значения C/N 0 , FLI и PLI дают удовлетворительные результаты. Полученное навигационное решение только для L1 оказалось сравнимым с коммерческим приемником и способным обеспечить метровую точность в одноточечном режиме. Сравнение решений только для L1 и только для L2 от программного приемника показало небольшое ухудшение решения для L2, что связано с более низким уровнем принимаемой мощности этого сигнала. Измерение псевдодальности без учета ионосферы также было выполнено с использованием двухчастотных данных, и было обнаружено, что оно дает немного худшее решение о местоположении из-за повышенного влияния шума и многолучевости.Тем не менее, возможность вычислить решение без учета ионосферы будет иметь важное значение, поскольку мы приближаемся к следующему солнечному максимуму. Второй набор данных использовался для оценки относительной производительности решений только для GPS, только для ГЛОНАСС и GPS/ГЛОНАСС.
Что касается захвата и отслеживания сигналов, результаты показали, что все видимые сигналы могут быть обнаружены при условии, что их сигналы достаточно сильны.В частности, было показано, что значения C/N 0 , FLI и PLI дают удовлетворительные результаты. Полученное навигационное решение только для L1 оказалось сравнимым с коммерческим приемником и способным обеспечить метровую точность в одноточечном режиме. Сравнение решений только для L1 и только для L2 от программного приемника показало небольшое ухудшение решения для L2, что связано с более низким уровнем принимаемой мощности этого сигнала. Измерение псевдодальности без учета ионосферы также было выполнено с использованием двухчастотных данных, и было обнаружено, что оно дает немного худшее решение о местоположении из-за повышенного влияния шума и многолучевости.Тем не менее, возможность вычислить решение без учета ионосферы будет иметь важное значение, поскольку мы приближаемся к следующему солнечному максимуму. Второй набор данных использовался для оценки относительной производительности решений только для GPS, только для ГЛОНАСС и GPS/ГЛОНАСС.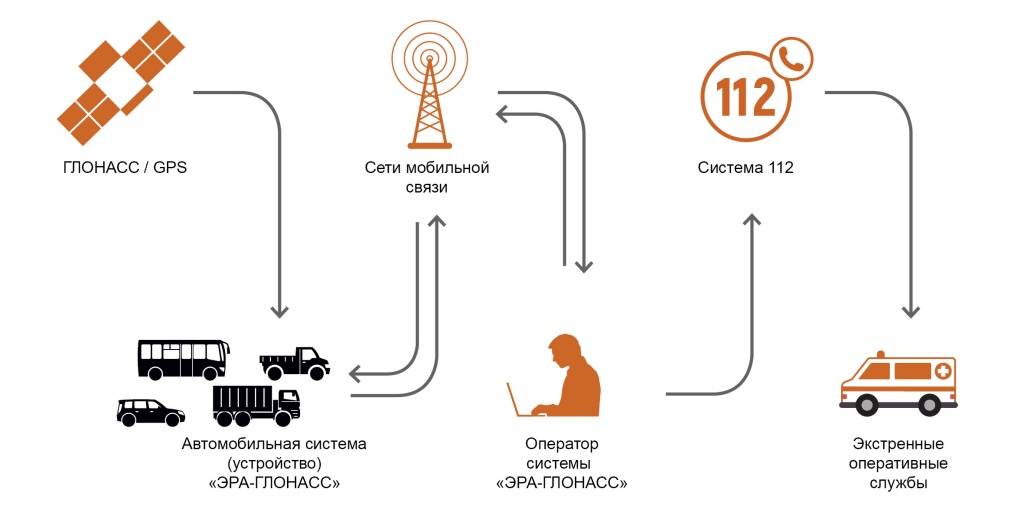 Как и ожидалось, двухсистемное решение дало наилучшие общие результаты. Однако следует отметить, что различия по сравнению с решением, основанным только на GPS, были относительно незначительными из-за большего количества спутников GPS, доступных во время испытаний, и большего веса, придаваемого данным GPS в программном обеспечении навигационного решения.В целом делается вывод, что программный приемник GPS/ГЛОНАСС действительно осуществим и полезен для улучшения характеристик позиционирования. В будущем разработанный программный приемник будет служить в качестве исследовательского инструмента для интеграции GPS/ГЛОНАСС. Кроме того, по мере запуска некоторых новых спутников ГЛОНАСС-К программное обеспечение приемника можно будет легко обновить для приема и отслеживания новых сигналов, которые станут …
Как и ожидалось, двухсистемное решение дало наилучшие общие результаты. Однако следует отметить, что различия по сравнению с решением, основанным только на GPS, были относительно незначительными из-за большего количества спутников GPS, доступных во время испытаний, и большего веса, придаваемого данным GPS в программном обеспечении навигационного решения.В целом делается вывод, что программный приемник GPS/ГЛОНАСС действительно осуществим и полезен для улучшения характеристик позиционирования. В будущем разработанный программный приемник будет служить в качестве исследовательского инструмента для интеграции GPS/ГЛОНАСС. Кроме того, по мере запуска некоторых новых спутников ГЛОНАСС-К программное обеспечение приемника можно будет легко обновить для приема и отслеживания новых сигналов, которые станут …